
源代码如下:
clear;
clc;
L1 = Link('d', 0, 'a', 0, 'alpha', pi/2); %Link 类函数
L2 = Link('d', 0, 'a', 0.5, 'alpha', 0,'offset',pi/2);
L3 = Link('d', 0, 'a', 0, 'alpha', pi/2,'offset',pi/4);
L4 = Link('d', 1, 'a', 0, 'alpha', -pi/2);
L5 = Link('d', 0, 'a', 0, 'alpha', pi/2);
L6 = Link('d', 1, 'a', 0, 'alpha', 0);
b=isrevolute(L1); %Link 类函数
robot=SerialLink([L1,L2,L3,L4,L5,L6]); %SerialLink 类函数
robot.name='带球形腕的拟人臂'; %SerialLink 属性值
robot.manuf='飘零过客'; %SerialLink 属性值
robot.display(); %Link 类函数
theta=[0 0 0 0 0 0];
robot.plot(theta); %SerialLink 类函数
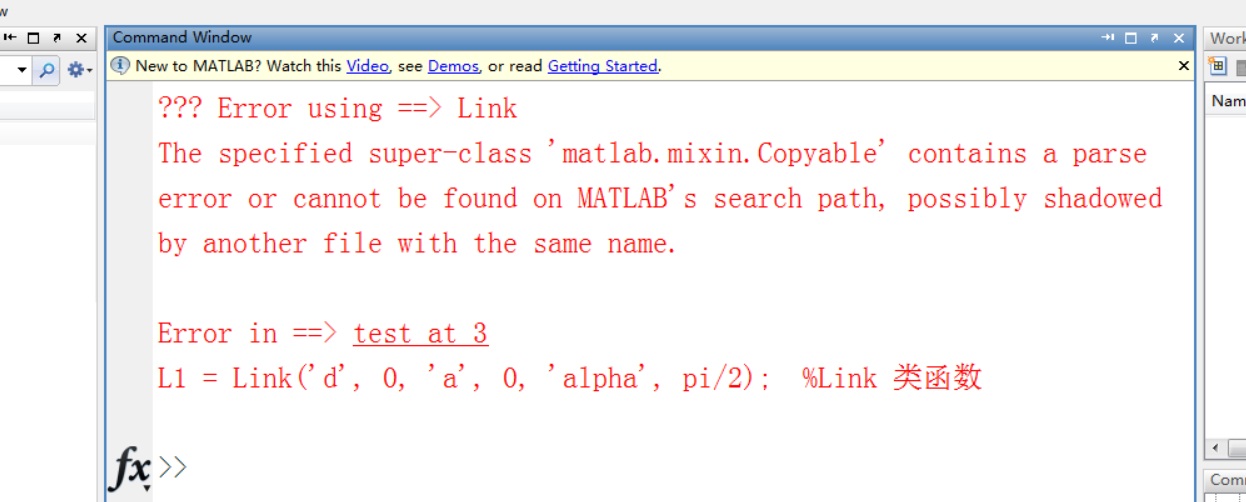
请大神帮忙看看是什么问题,谢谢各位了。







