
目的: 使用固定的单目相机**_倾斜_**着检测固定平面上的两点实际长度
目前已使用opencv中calibrateCamera函数标定相机,已求得相机**内参矩阵**、**5个畸变参数**、待检测面的**旋转向量和平移向量**;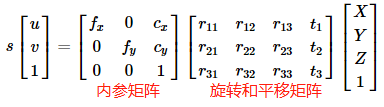
问题:现在有一张待检测面的图片,已知像素坐标,需求出对应的世界坐标(x,y)?
注意是世界坐标系Z=0的平面
按照我的理解,是不是对像素图片进行单应性矩阵H的逆变换?如果是这样,单应性矩阵H怎么根据内参矩阵、畸变参数、旋转平移矩阵求出?张正友标定法里的单应性矩阵应该**不包含**畸变系数
网上还有一种方法通过opencv中getPerspectiveTransform、perspectiveTransform函数直接求一个面到另一个面的透视变换矩阵进行透视变换,但这种方法应该不能矫正镜头畸变吧?
跪求,实在搞不清楚。







