
用AT89C51单片机控制步进电机,可进行旋转方向的选择,即正转(顺时针),反转(逆时针),且有6挡转速可选择,分别是5转/秒、2.5转/秒、1.25转/秒、1转/秒、0.5转/秒和0.25转/秒。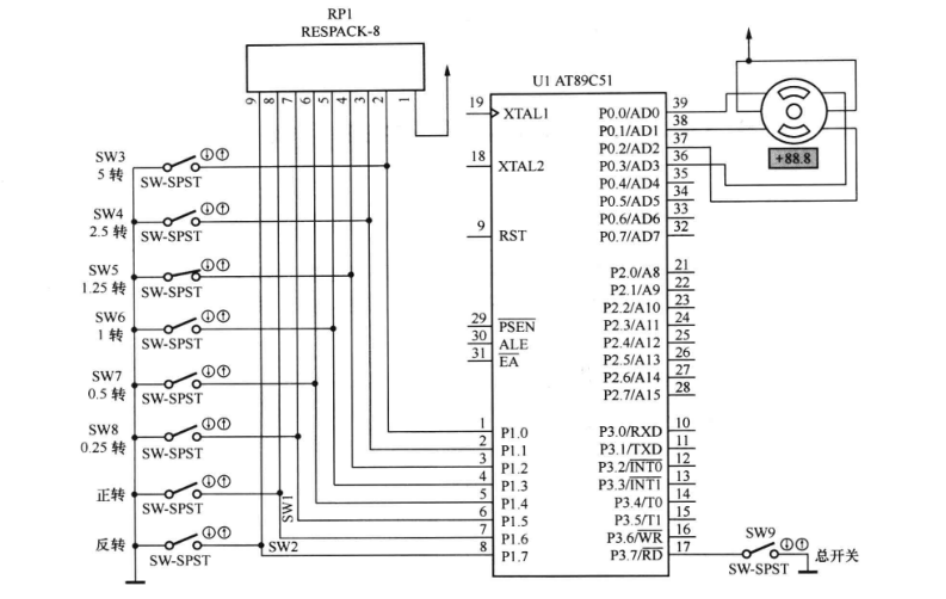
#include
#define uchar unsigned char
sbit P1_0=P1^0;
sbit P1_1=P1^1;
sbit P1_2=P1^2;
sbit P1_3=P1^3;
sbit P1_4=P1^4;
sbit P1_5=P1^5;
sbit P1_6=P1^6;
sbit P1_7=P1^7;
sbit shut=P3^7;
uchar RRR,flg,KKK; //RRR用于调速控制;flg=0正转;flg=1反转; flg=2不转;KKK为P1的状态寄存
uchar loop[2][4]={{?,?,?,?},{?,?,?,?}};//正转,反转,2相励磁法
void loop1(void);
void loop2(void);
void step(void);
main()
{
uchar i,j;
TMOD=0x10;
TL1=?; //产生20MS的单位步时间
TH1=?;
EA=0;
ET1=0;
while(1)
{
while(shut);//开关
if(KKK!=P1) //当P1的值发生变化,触发采集信号
loop1();
if(flg!=2)
{
for(i=0;i<=3;i++)
{
P0=loop[flg][i];
for(j=0;j<RRR;j++)
{
step();
}
}
}
}
}
void step(void) //产生20MS的单位步时间
{
TF1=0;
TR1=1;
while(TF1==0);
TR1=0;
TL1=?;
TH1=?;
}
void loop1(void) //采集顺时针或逆时针信号,P1.6=1,顺时针,P1.7=1,逆时针
{
KKK=P1; //暂存P1的状态
if(P1_6==1)
{
flg=0; //正转
loop2();
}
else if(P1_7==1)
{
flg=1; //反转
loop2();
}
else
{
flg=2; //不转
}
}
void loop2(void)
{
if(P1_0==0)
{
RRR=5; //5转每秒
}
else if(P1_1==0)
{
RRR=10; //2.5转每秒
}
else if(P1_2==0)
{
RRR=?; //1.25转每秒
}
else if(P1_3==0)
{
RRR=?; //1转每秒
}
else if(P1_4==0)
{
RRR=?; //0.5转每秒
}
else if(P1_5==0)
{
RRR=?; //0.25转每秒
}
}






