1.基于ego1开发板实现: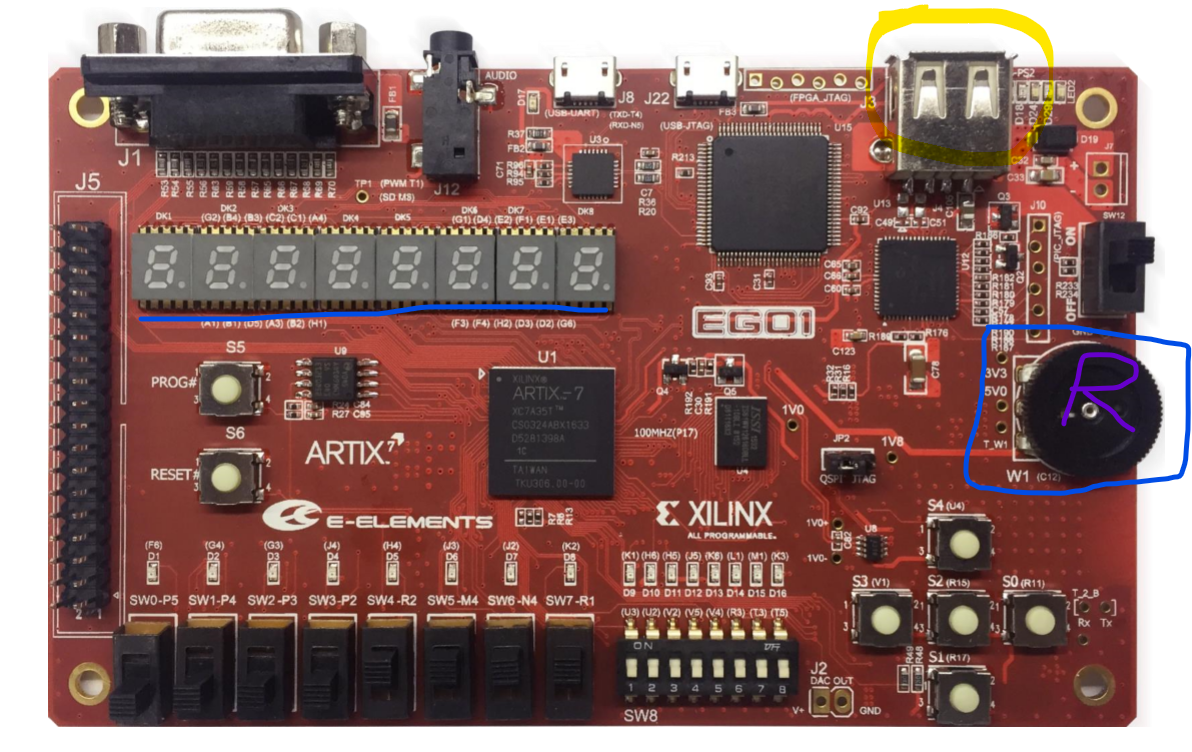
通过转动开发板电位器R改变电位器输出电压值(0-3.3V),利用DAC将电位器输出电压采样,而后利用数码管实时显示电位器电压?
2.利用vivado软件,基于Verilog hdl语言
3.电压调整步进值可为0.3v以上

1.基于ego1开发板实现:
通过转动开发板电位器R改变电位器输出电压值(0-3.3V),利用DAC将电位器输出电压采样,而后利用数码管实时显示电位器电压?
2.利用vivado软件,基于Verilog hdl语言
3.电压调整步进值可为0.3v以上
 分享
分享 `timescale 1ns / 1ps
module myADC (
input DCLK, // Clock input for DRP
input RESET,
input wire vauxp0,vauxn0,vauxp1,vauxn1,vauxp2,vauxn2,vauxp3,vauxn3,
//input [3:0] VAUXP, VAUXN, // Auxiliary analog channel inputs
input VP,VN,// Dedicated and Hardwired Analog Input Pair
//output reg [15:0] MEASURED_TEMP, MEASURED_VCCINT,
//output reg [15:0] MEASURED_VCCAUX, MEASURED_VCCBRAM,
//output reg [15:0] MEASURED_AUX0, MEASURED_AUX1,
//output reg [15:0] MEASURED_AUX2, MEASURED_AUX3,
output wire [7:0] ALM,//
output wire [6:0] seg1,seg2,
output reg [7:0] seg_cs,
output reg [1:0] DP,
output wire user_temp_alarm_out, //通用io
output wire vccint_alarm_out,
output wire vccaux_alarm_out,
output wire [4:0] CHANNEL,//2位数码管显示
output wire OT,
output wire XADC_EOC,
output wire XADC_EOS
);
//wire [15:0] temperature_tmp ;
reg [15:0] MEASURED_TEMP, MEASURED_VCCINT;
reg [15:0] MEASURED_VCCAUX, MEASURED_VCCBRAM;
reg [15:0] MEASURED_AUX0, MEASURED_AUX1;
reg [15:0] MEASURED_AUX2, MEASURED_AUX3;
reg [15:0] MEASURED_tmp1,MEASURED_tmp2;
reg [3:0] MEASURED_sequence;
wire clkcsc,clk1Hz;
//reg [7:0] seg_cs;
//wire [11:0] data_bin;//数据缓存
reg [3:0] dec_tmp1,dec_tmp2;
wire [19:0] dec_data_tmp1,dec_data_tmp2; //用于存储4位十进制数,每4个二进制位表示一个十进制位
//生成各种时钟 //频率=100M/2r
clk_self #(10000) u1(
.clk(DCLK),
.rst(RESET),
.clk_self(clkcsc) //片选时钟5k,频率=sys_clk/(2*翻转次数)
);
clk_self #(50_000_000) u2( //频率=100M/2r
.clk(DCLK),
.rst(RESET),
.clk_self(clk1Hz) //每4秒切换一次测量的数据
);
//二进制结果转换为3位十进制数(12位二进制表示)
bin2dec u3(
.data_bin(MEASURED_tmp1),
.data_dec(dec_data_tmp1)
);
bin2dec u4(
.data_bin(MEASURED_tmp2),
.data_dec(dec_data_tmp2)
);
//数码管译码
Digitron_Translator u5(
.data_in(dec_tmp1),
.seg(seg1)
);
Digitron_Translator u6(
.data_in(dec_tmp2),
.seg(seg2)
);
// assign temperature_tmp=MEASURED_TEMP*50398/65536-27315;
always@(posedge clk1Hz or negedge RESET)
begin
if(~RESET)
begin MEASURED_sequence<=1; end
else
begin
if (MEASURED_sequence<4) MEASURED_sequence<=MEASURED_sequence+1;
else MEASURED_sequence<=1;
case (MEASURED_sequence)
// 0:begin end
1:begin MEASURED_tmp1<=MEASURED_TEMP*50398/65536-27315;MEASURED_tmp2<=MEASURED_AUX0*100/65535; end //
2:begin MEASURED_tmp1<=MEASURED_VCCINT*300/65536;MEASURED_tmp2<=MEASURED_AUX1*100/65535;end
3:begin MEASURED_tmp1<=MEASURED_VCCAUX*300/65536;MEASURED_tmp2<=MEASURED_AUX2*100/65535;end
4:begin MEASURED_tmp1<=MEASURED_VCCBRAM*300/65536;MEASURED_tmp2<=MEASURED_AUX3*100/65535;end
// 5:begin end //电位器
// 6:begin end
// 7:begin end
endcase
end
end
//led显示的数字 always@(posedge clkcsc or negedge sys_rst)
always@(posedge clkcsc or negedge RESET)
begin
if(~RESET)
begin seg_cs <= ~8'b11011111;
dec_tmp2<=4'hf;
end
else
begin
seg_cs[7:0] = {seg_cs[6:0],seg_cs[7]};
case (seg_cs)
~8'b11111110:begin dec_tmp1<=dec_data_tmp1[3:0];DP<=2'b00;end
~8'b11111101:begin dec_tmp1<=dec_data_tmp1[7:4]; DP<=2'b00;end
~8'b11111011:begin dec_tmp1<=dec_data_tmp1[11:8];DP<=2'b01;end
~8'b11110111:begin dec_tmp1<=dec_data_tmp1[15:12];DP<=2'b00;end
~8'b11101111:begin dec_tmp2=(MEASURED_sequence>1)?MEASURED_sequence-1:4 ; DP<=2'b00;end
~8'b11011111:begin dec_tmp2<=dec_data_tmp2[3:0];DP<=2'b00;end
~8'b10111111:begin dec_tmp2<=dec_data_tmp2[7:4];DP<=2'b00;end
~8'b01111111:begin dec_tmp2<= dec_data_tmp2[11:8];DP<=2'b10;end
endcase
end
end
//wire VN;
//assign VN=0;
wire busy,eoc,eos;
wire [5:0] channel;
wire drdy;
reg [6:0] daddr;
reg [15:0] di_drp;
wire [15:0] do_drp;
//wire [15:0] vauxp_active;
//wire [15:0] vauxn_active;
reg [1:0] den_reg;
reg [1:0] dwe_reg;
reg [7:0] state;
parameter init_read = 8'h00,
read_waitdrdy = 8'h01,
write_waitdrdy = 8'h03,
read_reg00 = 8'h04,
reg00_waitdrdy = 8'h05,
read_reg01 = 8'h06,
reg01_waitdrdy = 8'h07,
read_reg02 = 8'h08,
reg02_waitdrdy = 8'h09,
read_reg06 = 8'h0a,
reg06_waitdrdy = 8'h0b,
read_reg10 = 8'h0c,
reg10_waitdrdy = 8'h0d,
read_reg11 = 8'h0e,
reg11_waitdrdy = 8'h0f,
read_reg12 = 8'h10,
reg12_waitdrdy = 8'h11,
read_reg13 = 8'h12,
reg13_waitdrdy = 8'h13;
always @(posedge DCLK)
if (~RESET) begin
state <= init_read;
den_reg <= 2'h0;
dwe_reg <= 2'h0;
di_drp <= 16'h0000;
end
else
case (state)
init_read : begin
daddr = 7'h40; //配置寄存器
den_reg = 2'h2; // performing read
if (busy == 0 ) state <= read_waitdrdy;
end
read_waitdrdy :
if (drdy ==1) begin
di_drp = do_drp & 16'h03_FF; //Clearing AVG bits for Configreg0
daddr = 7'h40;
den_reg = 2'h2;
dwe_reg = 2'h2; // performing write
state = write_waitdrdy;
end
else begin
den_reg = { 1'b0, den_reg[1] } ;
dwe_reg = { 1'b0, dwe_reg[1] } ;
state = state;
end
write_waitdrdy :
if (drdy ==1) begin
state = read_reg00;
end
else begin
den_reg = { 1'b0, den_reg[1] } ;
dwe_reg = { 1'b0, dwe_reg[1] } ;
state = state;
end
read_reg00 : begin
daddr = 7'h00;
den_reg = 2'h2; // performing read
if (eos== 1) state <= reg00_waitdrdy;
end
reg00_waitdrdy :
if (drdy ==1) begin
MEASURED_TEMP = do_drp;
state <=read_reg01;
end
else begin
den_reg = { 1'b0, den_reg[1] } ;
dwe_reg = { 1'b0, dwe_reg[1] } ;
state = state;
end
read_reg01 : begin
daddr = 7'h01;
den_reg = 2'h2; // performing read
state <=reg01_waitdrdy;
end
reg01_waitdrdy :
if (drdy ==1) begin
MEASURED_VCCINT = do_drp;
state <=read_reg02;
end
else begin
den_reg = { 1'b0, den_reg[1] } ;
dwe_reg = { 1'b0, dwe_reg[1] } ;
state = state;
end
read_reg02 : begin
daddr = 7'h02;
den_reg = 2'h2; // performing read
state <=reg02_waitdrdy;
end
reg02_waitdrdy :
if (drdy ==1) begin
MEASURED_VCCAUX = do_drp;
state <=read_reg06;
end
else begin
den_reg = { 1'b0, den_reg[1] } ;
dwe_reg = { 1'b0, dwe_reg[1] } ;
state = state;
end
read_reg06 : begin
daddr = 7'h06;
den_reg = 2'h2; // performing read
state <=reg06_waitdrdy;
end
reg06_waitdrdy :
if (drdy ==1) begin
MEASURED_VCCBRAM = do_drp;
state <= read_reg10;
end
else begin
den_reg = { 1'b0, den_reg[1] } ;
dwe_reg = { 1'b0, dwe_reg[1] } ;
state = state;
end
read_reg10 : begin
daddr = 7'h10;
den_reg = 2'h2; // performing read
state <= reg10_waitdrdy;
end
reg10_waitdrdy :
if (drdy ==1) begin
MEASURED_AUX0 = do_drp;
state <= read_reg11;
end
else begin
den_reg = { 1'b0, den_reg[1] } ;
dwe_reg = { 1'b0, dwe_reg[1] } ;
state = state;
end
read_reg11 : begin
daddr = 7'h11;
den_reg = 2'h2; // performing read
state <= reg11_waitdrdy;
end
reg11_waitdrdy :
if (drdy ==1) begin
MEASURED_AUX1 = do_drp;
state <= read_reg12;
end
else begin
den_reg = { 1'b0, den_reg[1] } ;
dwe_reg = { 1'b0, dwe_reg[1] } ;
state = state;
end
read_reg12 : begin
daddr = 7'h12;
den_reg = 2'h2; // performing read
state <= reg12_waitdrdy;
end
reg12_waitdrdy :
if (drdy ==1) begin
MEASURED_AUX2= do_drp;
state <= read_reg13;
end
else begin
den_reg = { 1'b0, den_reg[1] } ;
dwe_reg = { 1'b0, dwe_reg[1] } ;
state = state;
end
read_reg13 : begin
daddr = 7'h13;
den_reg = 2'h2; // performing read
state <= reg13_waitdrdy;
end
reg13_waitdrdy :
if (drdy ==1) begin
MEASURED_AUX3= do_drp;
state <=read_reg00;
daddr = 7'h00;
end
else begin
den_reg = { 1'b0, den_reg[1] } ;
dwe_reg = { 1'b0, dwe_reg[1] } ;
state = state;
end
endcase
XADC0 u7 (
.di_in(di_drp), // input wire [15 : 0] di_in
.daddr_in(daddr), // input wire [6 : 0] daddr_in
.den_in(den_reg[0]), // input wire den_in
.dwe_in(dwe_reg[0]), // input wire dwe_in
.drdy_out(drdy), // output wire drdy_out
.do_out(do_drp), // output wire [15 : 0] do_out
.dclk_in(DCLK), // input wire dclk_in
.reset_in(~RESET), // input wire reset_in
.vp_in(VP), // input wire vp_in
.vn_in(VN), // input wire vn_in
.vauxp0(vauxp0), // input wire vauxp0
.vauxn0(vauxn0), // input wire vauxn0
.vauxp1(vauxp1), // input wire vauxp1
.vauxn1(vauxn1), // input wire vauxn1
.vauxp2(vauxp2), // input wire vauxp2
.vauxn2(vauxn2), // input wire vauxn2
.vauxp3(vauxp3), // input wire vauxp3
.vauxn3(vauxn3), // input wire vauxn3
.user_temp_alarm_out(user_temp_alarm_out), // output wire user_temp_alarm_out
.vccint_alarm_out(vccint_alarm_out), // output wire vccint_alarm_out
.vccaux_alarm_out(vccaux_alarm_out), // output wire vccaux_alarm_out
.ot_out(OT), // output wire ot_out
.channel_out(CHANNEL), // output wire [4 : 0] channel_out
.eoc_out(eoc), // output wire eoc_out
.alarm_out(ALM), // output wire alarm_out
.eos_out(eos), // output wire eos_out
.busy_out(busy) // output wire busy_out
);
//assign vauxp_active = {12'h000, VAUXP[3:0]};
//assign vauxn_active = {12'h000, VAUXN[3:0]};
assign XADC_EOC = eoc;
assign XADC_EOS = eos;
endmodule
分享




