#include
#include
#include
#include
#include
#include
#include
#include
#include
//ros::NodeHandle ph;
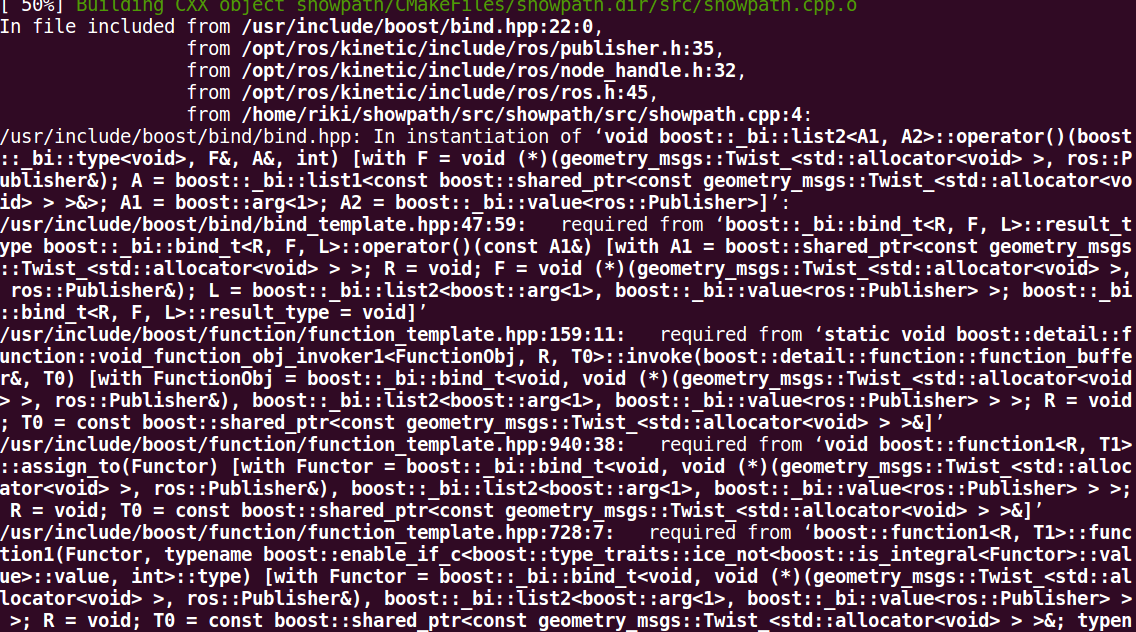
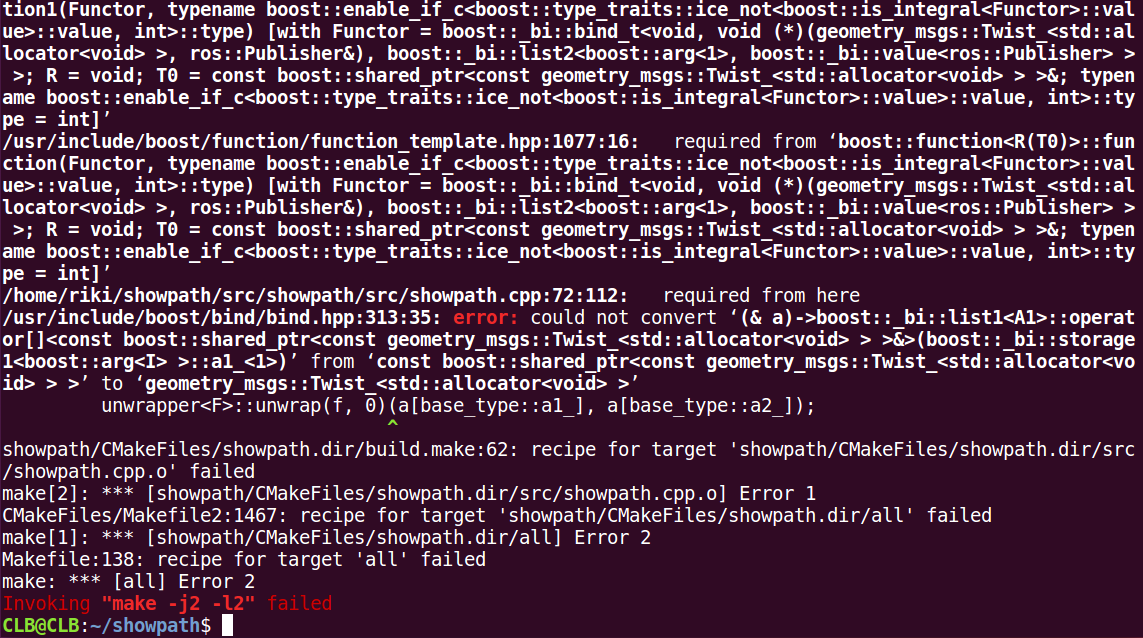
void callBack(const geometry_msgs::Twist twist, ros::Publisher& path_pub)
{
// ros::Publisher path_pub = ph.advertise("trajectory", 1, true);
nav_msgs::Path path;
ros::Time current_time, last_time;
current_time = ros::Time::now();
last_time = ros::Time::now();
path.header.stamp=current_time;
path.header.frame_id="odom";
ros::Rate loop_rate(1);
double x=0.0;
double y = 0.0;
double th=0.0;
while (ros::ok())
{
double temp_x;
double temp_y;
double dt=0.1;
temp_x = twist.linear.x * dt;
x += temp_x;
temp_y=twist.linear.y * dt;
y+=temp_y;
geometry_msgs::PoseStamped this_pose_stamped;
this_pose_stamped.pose.position.x = x;
this_pose_stamped.pose.position.y = y;
geometry_msgs::Quaternion goal_quat = tf::createQuaternionMsgFromYaw(th);
this_pose_stamped.pose.orientation.x = goal_quat.x;
this_pose_stamped.pose.orientation.y = goal_quat.y;
this_pose_stamped.pose.orientation.z = goal_quat.z;
this_pose_stamped.pose.orientation.w = goal_quat.w;
this_pose_stamped.header.stamp=current_time;
this_pose_stamped.header.frame_id = "odom";
path.poses.push_back(this_pose_stamped);
path_pub.publish(path);
ros::spinOnce(); // check for incoming messages
last_time = current_time;
loop_rate.sleep();
}
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "showpath");
ros::NodeHandle ph;
//接受消息
ros::Publisher path_pub = ph.advertise("trajectory", 1, true);
ros::Subscriber sub=ph.subscribe<geometry_msgs::Twist>("cmd_vel", 1,boost::bind(callBack, _1, path_pub));
// ros::Subscriber sub=ph.subscribe("cmd_vel", 1,callBack);
ros::spin();
return 0;
}