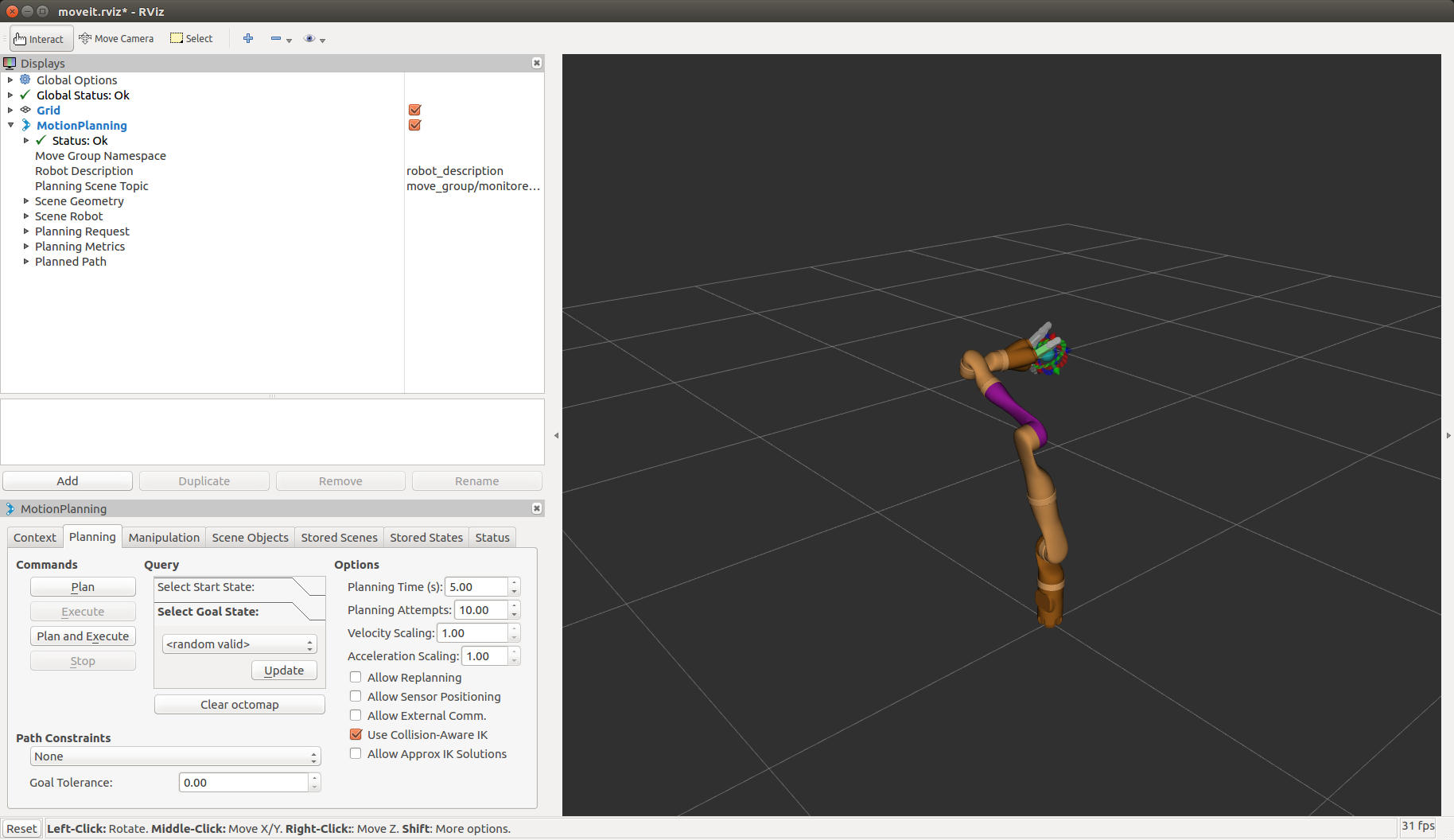
我运行roslaunch j2s7s300_moveit_config j2s7s300_demo.launch 时没有任何错误提示。
但是有的时候打开可视化界面,第四个手臂是紫色的,然后随便规划个路径,运行(Plan and Execute),就会出现这个错误。但是有的时候又是好的,可以规划,可以用接口跑代码。 [
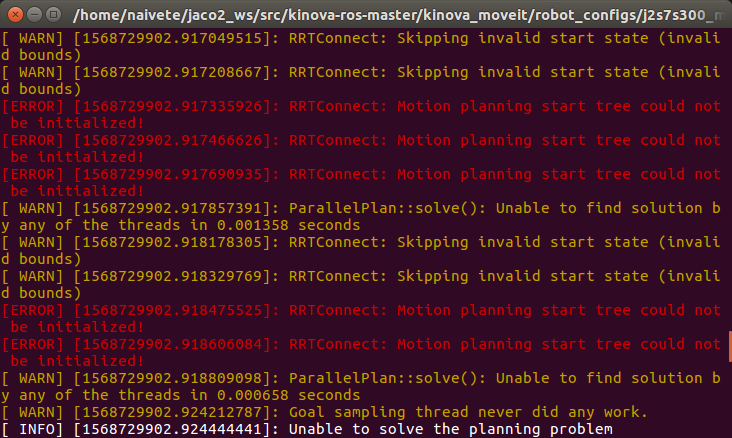
WARN] [1568729902.918329769]: RRTConnect: Skipping invalid start state (invalid bounds) [ERROR] [1568729902.918475525]: RRTConnect: Motion planning start tree could not be initialized!