
1.问题描述
有一份写好的Urdf文件,通过launch程序可在Rviz中正常显示。但在随后的启动Gazebo过程后,Rviz中提示RobotModel和TF错误。
2.运行截图。
首先观察在Rviz中模型显示情况:
运行:
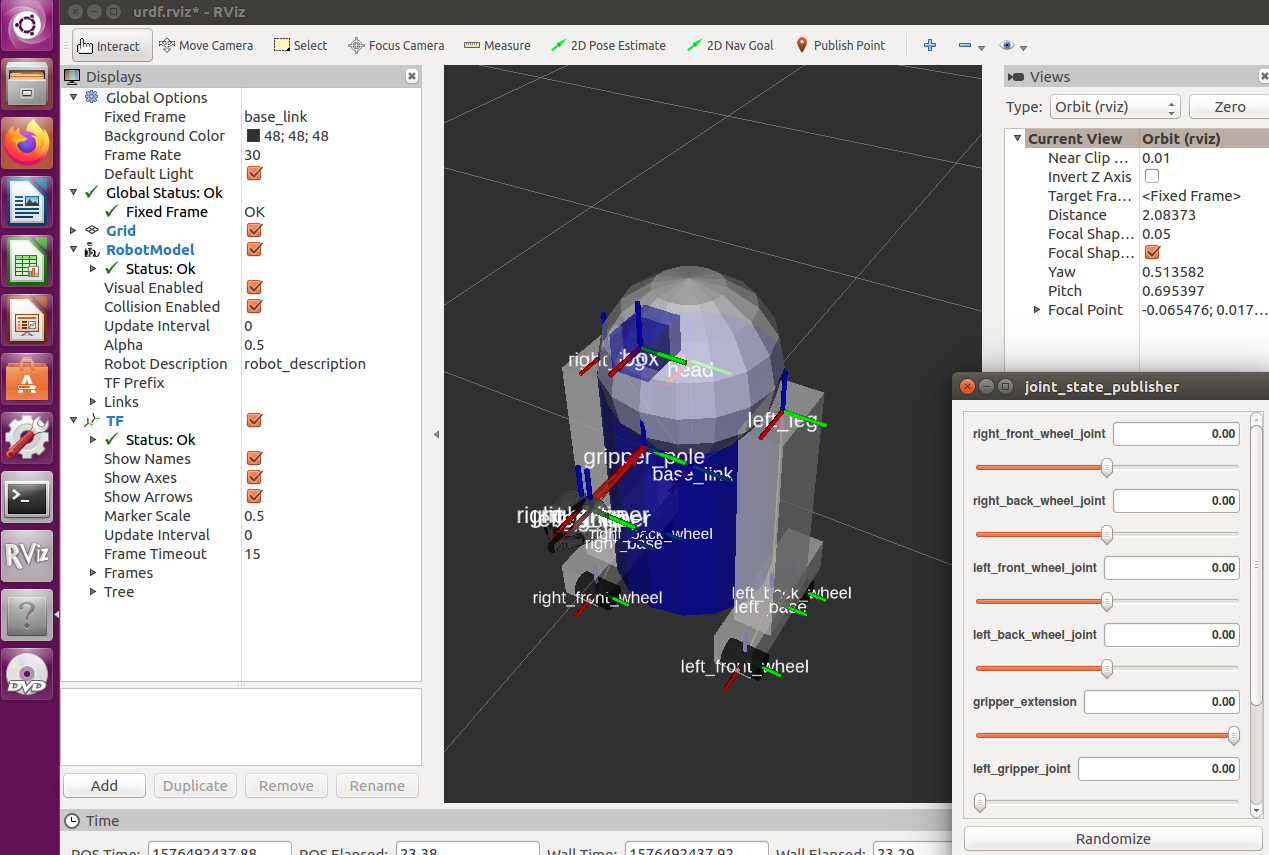
roslaunch urdf_tutorial display.launch model:='$(find urdf_tutorial)/urdf/test.urdf.xacro'
模型显示如下,正常。
随后,修改launch文件,在Gazebo中打开同一Urdf(Xacro)文件,
运行
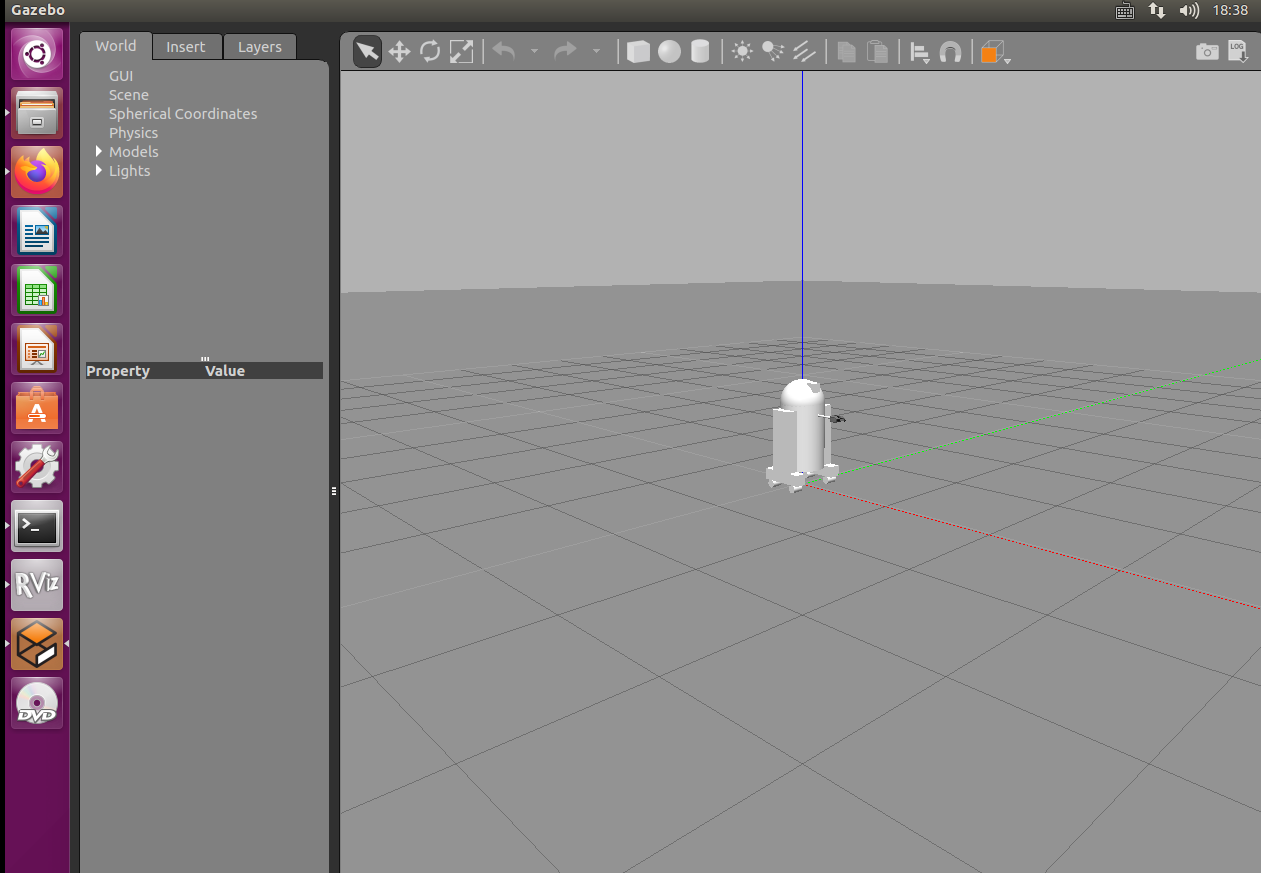
roslaunch urdf_sim_tutorial test.launch
模型在Gazebo中显示如下:
在Rviz中显示如下:
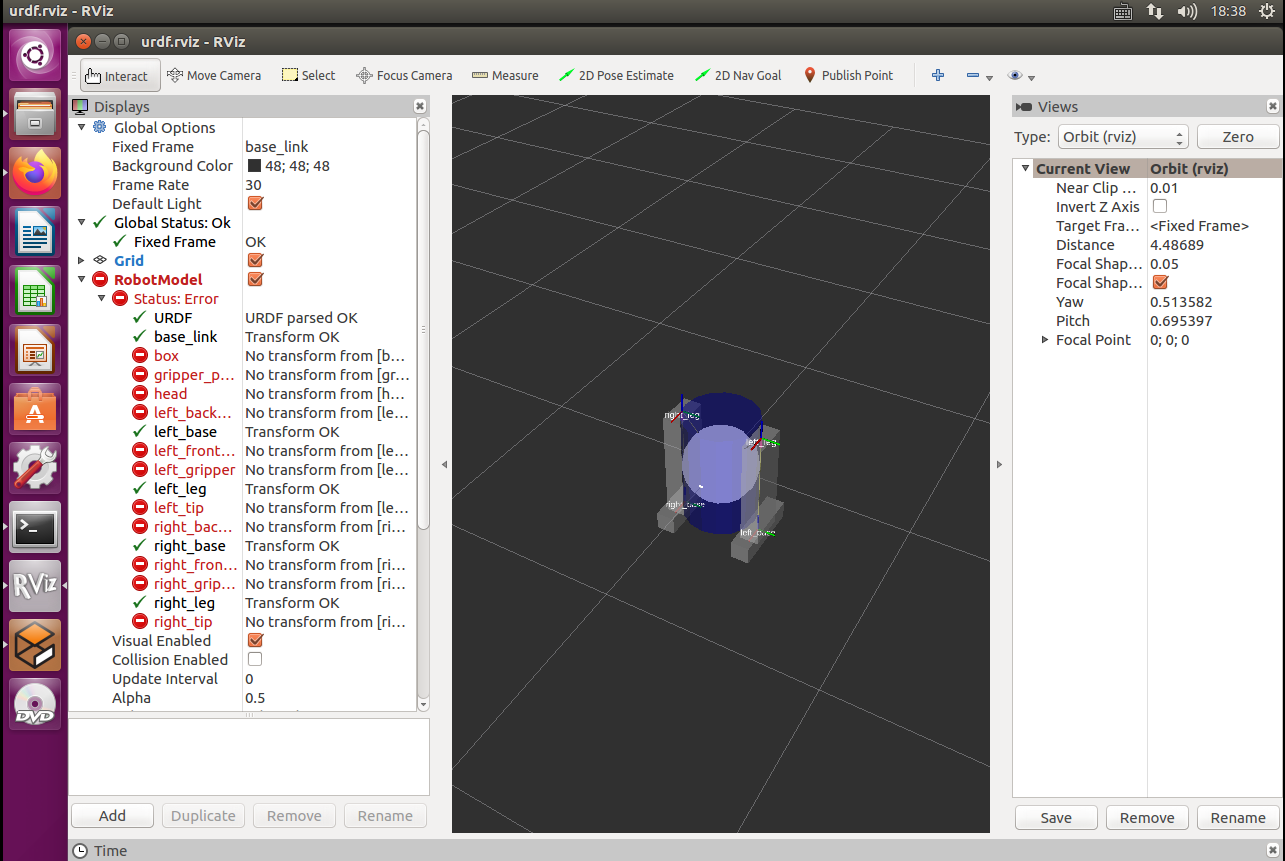
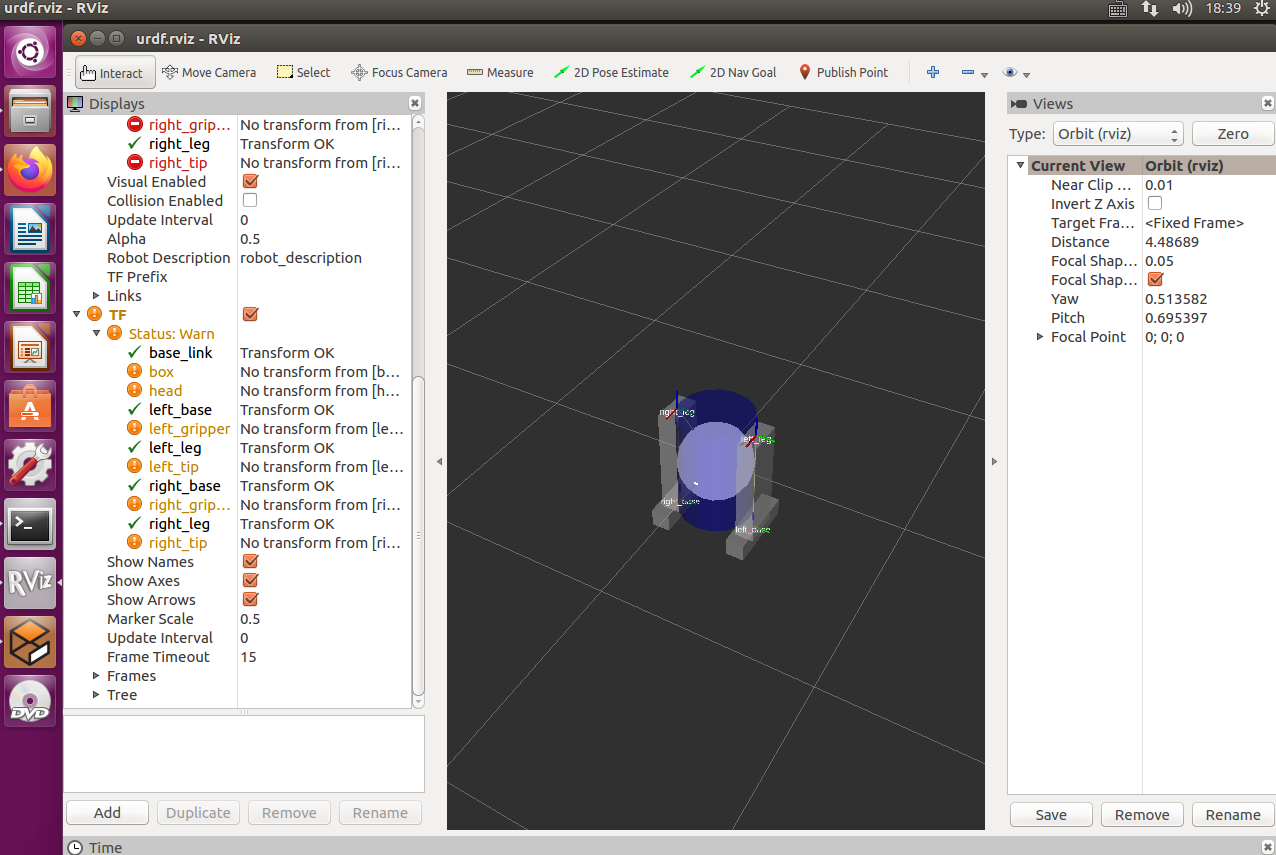
如图所示,出现了错误(No transform from sth to base_link),请问这是为什么呢?





