我用mpu9250来解算姿态,加速度计做了六面校准法,磁力计做了椭球拟合,陀螺仪减了零偏,加速度和磁力计原始数据用的六深度窗口滑动进行滤波,用的mahony互补滤波解算姿态,但是得到的yaw角还是有问题:比如我只绕x轴转动,yaw角也会变化几十度,去掉磁力计的融合算法得到的数据就没有问题。
不知道有没有大佬知道这是为什么?我焊接温度在280度以下,换了好几家的9250芯片,也换用过madgwick算法和PX4算法进行姿态融合过,但是yaw角还是一直有问题,校正后的磁力计数据也单独看过,稳定在0.3GS左右,现在实在是不知道哪里有问题了。有没有大哥能指点一下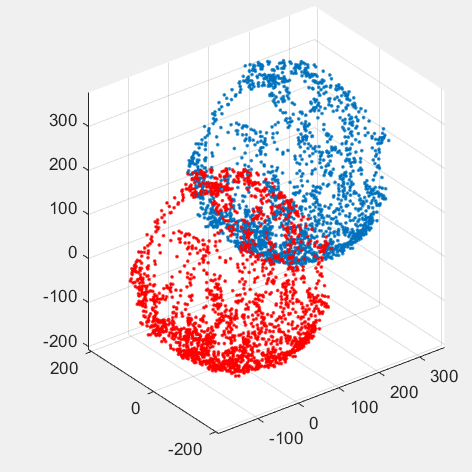 (这是我的磁力计椭球拟合的结果,红色的是标定后的,磁力计数据也没什么问题)
(这是我的磁力计椭球拟合的结果,红色的是标定后的,磁力计数据也没什么问题)

mpu9250姿态解算得到的yaw角不正确

- 写回答
- 好问题 0 提建议
- 追加酬金
- 关注问题
 分享
分享- 邀请回答
-


3条回答 默认 最新

- 2019-10-08 14:54回答 3 已采纳 读取磁力计数据后在设置磁力计为单次测量模式,顺序不要搞反了
- 2019-10-28 11:15回答 2 已采纳 一般磁力计和加速度计的截止频率设置为30HZ就行,或者你用8深度的窗口滑动滤波也可以,更方便,这个是窗口平均滑动滤波的代码https://blog.csdn.net/enjoy_learn/artic
- 2019-10-08 22:25回答 4 已采纳 单片机单个IO端口驱动负载的能力有限,对应的I2C接口下挂的从设备过多时,整个电路就会失效。应该可以用示波器抓取SDA触发时的波形来观察,信号电压是否不够稳。解决的话,要么SDA也用开关选通,要么限制
- 2022-07-08 09:35Mdc_stdio的博客 MPU6050姿态解算大家可用于 课程设计 或 毕业设计单片机-嵌入式毕设选题大全及项目分享:https://blog.csdn.net/m0_71572576/article/details/125409052MPU6050是一种非常流行的空间运动传感器芯片,可以获取器件当前...
- 2020-06-14 20:32回答 1 已采纳 ?多看数据手册,东西都在上面
- 2019-10-05 19:04回答 2 已采纳 # 参考 https://blog.csdn.net/wx601056818/article/details/81412216
- 2019-10-07 23:01回答 4 已采纳 试着把scl线和sda线都用吗模拟开关分选试一下
- 2019-10-24 19:08回答 2 已采纳 一般磁力计和加速度计的截止频率设置为30HZ就行,或者你用8深度的窗口滑动滤波也可以,更方便,这个是窗口平均滑动滤波的代码https://blog.csdn.net/enjoy_learn/artic
- 2017-11-04 10:05回答 1 已采纳 需要转化的啊,不可能直接拿来就能用的,找一找相关的函数吧,看看这个有没有用[http://blog.csdn.net/zat907943815/article/details/53456636?loc
- 2023-01-10 14:22回答 3 已采纳 这篇文章讲的很详细,请看:移植DMP到MPU6050获取欧拉角
- 2021-01-17 19:17PableetoX的博客 axyz是测量得到的重力向量,vxyz是陀螺积分后的姿态来推算出的重力向量,它们都是机体坐标参照系上的重力向量。 那它们之间的误差向量,就是陀螺积分后的姿态和加计测出来的姿态之间的误差。 向量间的误差,可以用...
- 2024-02-15 22:38路溪非溪的博客 对比DMP和自己进行姿态解算:使用DMP我们可以直接得到四元数,但是如果不用DMP的话,就得自己来进行解算,根据得到的各轴角速度以及加速度,再经过滤波,接着计算出四元数或者欧拉角,然后还得进行姿态融合。...
- 2024-03-21 22:00北辰远_code的博客 文章主要讲述了mpu6050的姿态获取原理,使用HAL库编程时Cube MX的配置和Cube IDE编程,DMP解算MPU6050姿态的过程,附带开源代码。
- 2022-08-24 19:07小电动车的博客 树莓派pico mpu6050 一阶互补滤波&四元数法 解算姿态角
- 2021-11-27 11:45小飞哥玩嵌入式的博客 小伙伴们大家好,好久不更新RT-Thread实战笔记啦,今天来搞一搞MPU6050,话不多说,淦! 本章源码获取 欢迎文末留言区或者公众号后台回复“MPU6050”即可获取本教程源码 MPU6050简介 某宝买的,吃灰许久了... ...
- 2022-03-30 17:18Naiva的博客 MPU6050的特点MPU6050框图MPU6050初始化MPU6050寄存器电源管理寄存器1(0X6B)陀螺仪配置寄存器(0X1B)加速度传感器配置寄存器(0X1C)FIFO使能寄存器(0X23)陀螺仪采样率分频寄存器(0X19)配置寄存器(0X1A)...
- 2022-03-18 15:47嵌入式创客工坊的博客 (1)编程平台:Keil5 (2)CubeMX (3)XCOM(串口调试助手) (4)文件资料包: 2.硬件准备 (1)一个捡来的MPU6050 (2)F1的板子,本例使用经典F103C8T6 (3)ST-link下载器 (4)USB-TTL模块 (5)杜邦线若干 3...
- 2021-06-21 15:51轩阁楼主的博客 MPU9250 内部包括 3 轴陀螺仪、3 轴加速度计和 3 轴磁力计,这3个功能输出都是 16 位的数字量; 可以通过常用的数据总线( IIC) 接口和单片机进行数据交互,传输速率 400 kHz /s。陀螺仪的角速度测量范围±2000(° /s...
- 没有解决我的问题, 去提问


悬赏问题
- ¥15 outlook无法配置成功
- ¥30 这是哪个作者做的宝宝起名网站
- ¥60 版本过低apk如何修改可以兼容新的安卓系统
- ¥25 由IPR导致的DRIVER_POWER_STATE_FAILURE蓝屏
- ¥50 有数据,怎么建立模型求影响全要素生产率的因素
- ¥50 有数据,怎么用matlab求全要素生产率
- ¥15 TI的insta-spin例程
- ¥15 完成下列问题完成下列问题
- ¥15 C#算法问题, 不知道怎么处理这个数据的转换
- ¥15 YoloV5 第三方库的版本对照问题