
在复制网上找到的代码以后,运行,出现错误,应该怎么解决?
看过相关资料但还是不会改,我就是个渣渣。请直接告诉我怎么改,谢谢了,救救孩子吧。
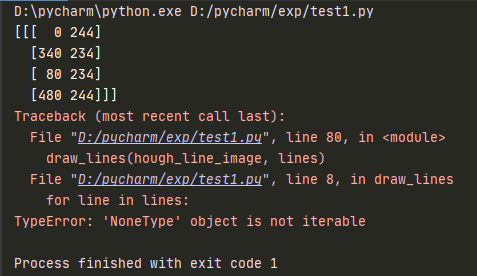
报错:
代码:
import numpy as np
import cv2
import matplotlib.pyplot as plt
import matplotlib.image as mpimg
'''根据极角极径参数在原图像中画线'''
def draw_lines(img, lines, color=[255, 0, 0], thickness=6):
for line in lines:
for x1, y1, x2, y2 in line:
# 在图像中设置俩条水平线,只有当直线于其相交,才绘制该直线,用于筛选直线
top_horizon_line = ([0, img.shape[0] * 0.6], [img.shape[1], img.shape[0] * 0.7])
bottom_horizon_line = ([0, img.shape[0]], [img.shape[1], img.shape[0]])
line_intersection_top = line_intersection(top_horizon_line, ([x1, y1], [x2, y2]))
line_intersection_bottom = line_intersection(bottom_horizon_line, ([x1, y1], [x2, y2]))
if line_intersection_top == None or line_intersection_bottom == None:
return
# 绘制直线
cv2.line(img, line_intersection_top, line_intersection_bottom, color, thickness)
'''判断俩条线段是否相交'''
def line_intersection(line1, line2):
xdiff = (line1[0][0] - line1[1][0], line2[0][0] - line2[1][0])
ydiff = (line1[0][1] - line1[1][1], line2[0][1] - line2[1][1])
def det(a, b):
return a[0] * b[1] - a[1] * b[0]
div = det(xdiff, ydiff)
if div == 0:
return None
d = (det(*line1), det(*line2))
x = det(d, xdiff) / div
y = det(d, ydiff) / div
return int(x), int(y)
image = cv2.imread("test.png") # 读取源图像
showImg = True
image = np.array(image)
grayscale_image = cv2.cvtColor(image, cv2.COLOR_RGB2GRAY) # 转为灰度图
kernel_size = 5
# 高斯平滑,大小为5的高斯核
gaussian_blur_image = cv2.GaussianBlur(grayscale_image, (kernel_size, kernel_size), 0)
# 设置阈值,进行canny边缘提取
canny_low_threshold = 10
canny_high_threshold = 20
edge_image = cv2.Canny(gaussian_blur_image, canny_low_threshold, canny_high_threshold)
# ROI可视区域选择,本程序选取左测公路区域
image_shape = edge_image.shape
x_offset = 200
y_offset = 90
v1 = (0, image_shape[0] - y_offset / 2)
v2 = (int(image_shape[1] / 4 + x_offset), int(image_shape[0] / 2 + y_offset))
v3 = (int(image_shape[1] / 2 - x_offset), int(image_shape[0] / 2 + y_offset))
v4 = (image_shape[1] / 2 + x_offset, image_shape[0] - y_offset / 2)
vert = np.array([[v1, v2, v3, v4]], dtype=np.int32)
mask = np.zeros_like(edge_image)
if len(edge_image.shape) > 2:
channel_count = edge_image.shape[2]
ignore_mask_color = (255,) * channel_count
else:
ignore_mask_color = 255
# ROI可视区填充,在用mask与灰度图进行与运算,即在灰度图中得可视区
cv2.fillPoly(mask, vert, ignore_mask_color)
masked_edge_image = cv2.bitwise_and(edge_image, mask)
# 显示可视区的边缘提取二值图像
cv2.imshow("edge", masked_edge_image)
print(np.array([[v1, v2, v3, v4]], dtype=np.int32))
# 霍夫线变换
rho = 2 # 设置极径分辨率
theta = (np.pi) / 180 # 设置极角分辨率
threshold = 100 # 设置检测一条直线所需最少的交点
min_line_len = 300 # 设置线段最小长度
max_line_gap = 20 # 设置线段最近俩点的距离
lines = cv2.HoughLinesP(masked_edge_image, rho, theta, threshold, np.array([]), minLineLength=min_line_len,
maxLineGap=max_line_gap)
hough_line_image = np.zeros((masked_edge_image.shape[0], masked_edge_image.shape[1], 3), dtype=np.uint8)
# 绘制检测到的直线
draw_lines(hough_line_image, lines)
# 将直线与原图像合成为一幅图像
sync_image = cv2.addWeighted(image, 0.8, hough_line_image, 1, 0)
# 显示图像
if showImg:
plt.imshow(sync_image)
plt.show()
cv2.imshow("lane", sync_image)
cv2.waitKey(0)





