
问题描述:镭神的16线激光雷达+cartographer算法,我的思路是用rosbag record命令录制bag文件,然后跑cartographer_offline_3d,没有任何的点云或者map显示。尝试用cartographer_ros_validate检测bag报错如图: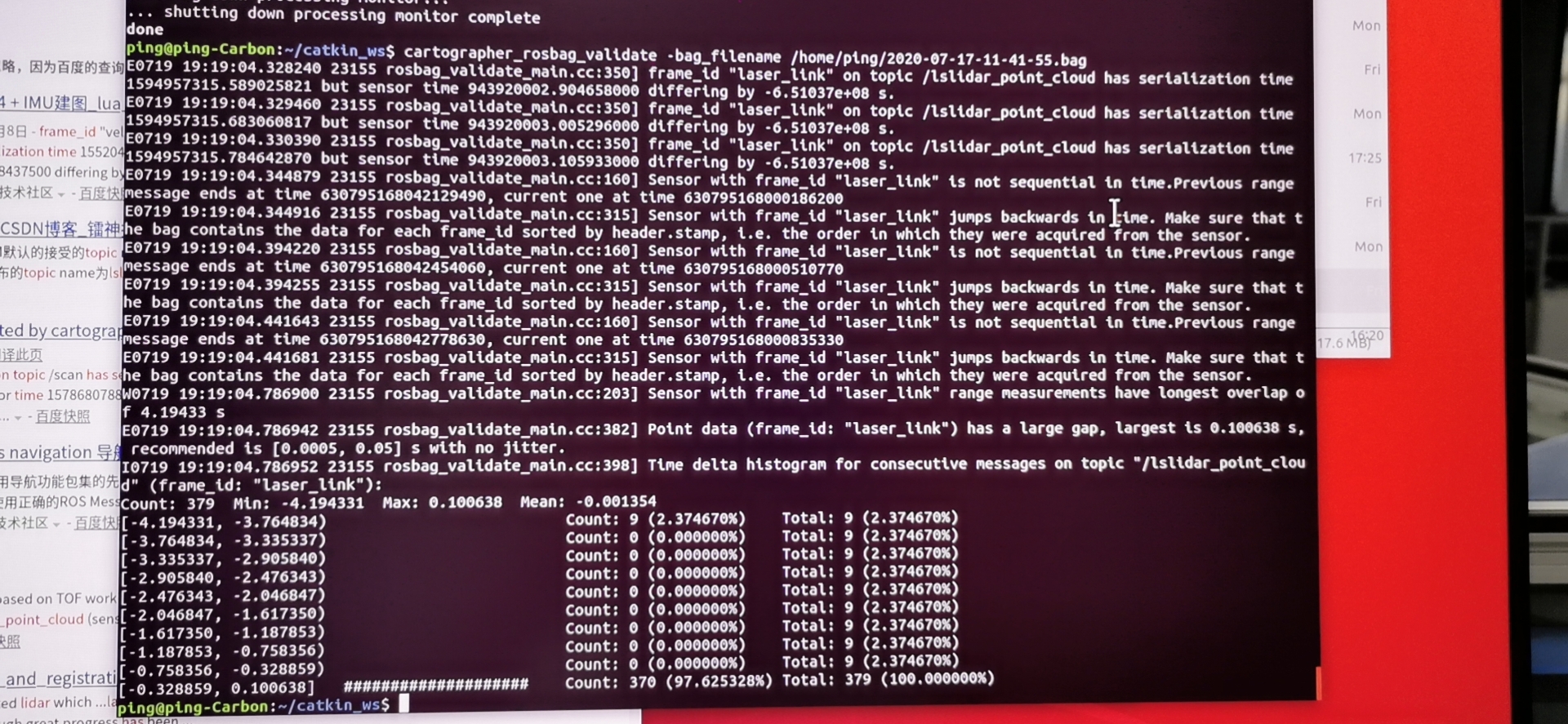
报错信息都和时间相关,不知道怎么解决。
网上有说这些信息不影响建图的
但是直接建图也不成功,无论离线还是实时
尝试修改lua和launch文
件,也是一知半解: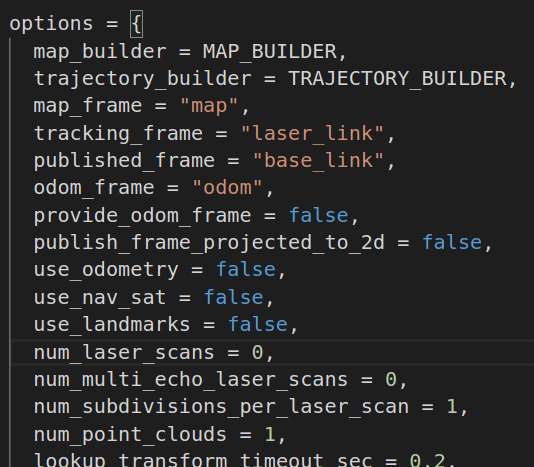
TRAJECTORY_BUILDER_3D.num_accumulated_range_data = 1
主要修改了tracking_frame、num_point_clouds。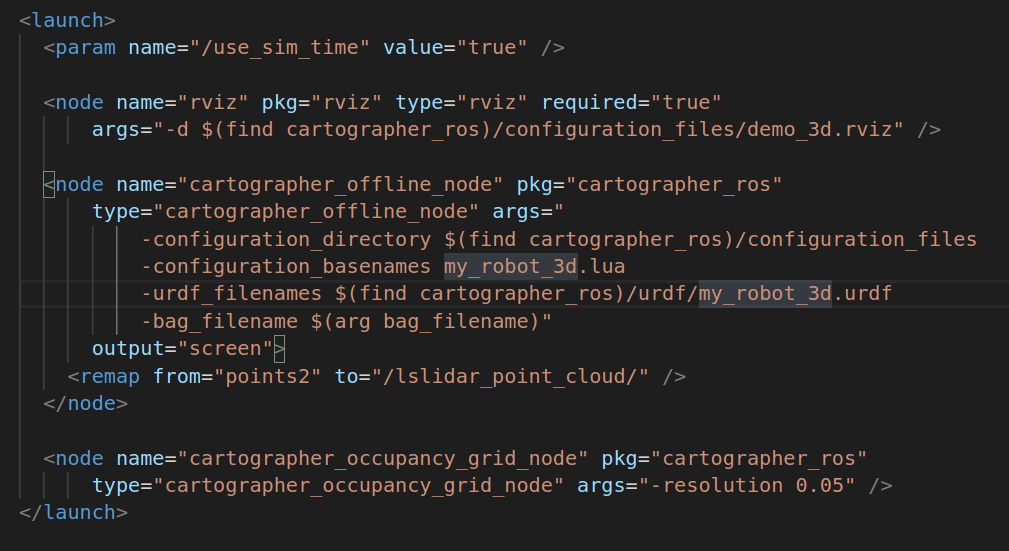
launch文件中修改了lua文件名urdf文件名以及remap(和激光溜达发布的保持一致)
作为一个SLAM小白,对linux系统和ROS都不是很熟悉,求助大神帮忙给出解决思路!感谢~







