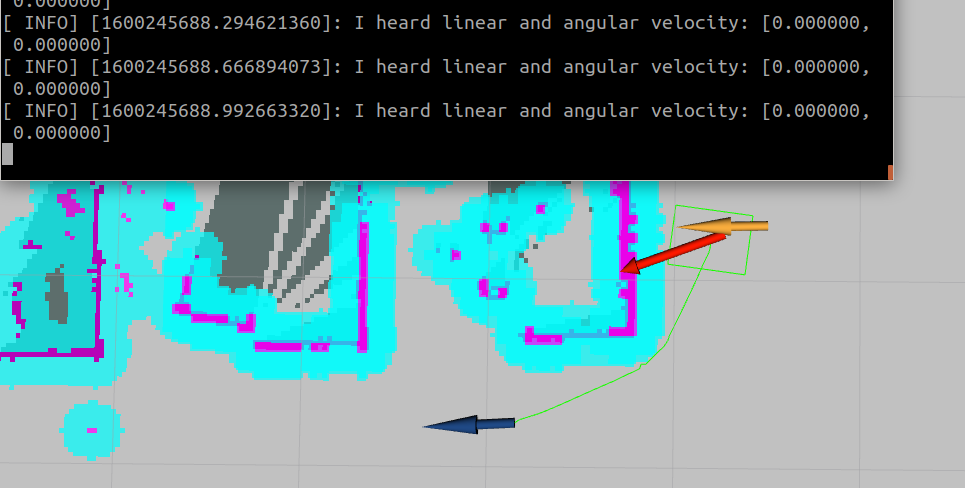
如图所示,在存在路径规划的情况下,一直下发线速度和角速度为0 的情况。
收起
当前问题酬金
¥ 0 (可追加 ¥500)
支付方式
扫码支付
支付金额 15 元
提供问题酬金的用户不参与问题酬金结算和分配
支付即为同意 《付费问题酬金结算规则》
https://blog.csdn.net/qq_29320587/article/details/104842330
报告相同问题?

 分享
分享




