最近在做标定手眼关系(eye in hand )中用到非线性最优化来求解方程AX=XB,
但对于非线性最优化了解不多,理解困难。
参考文中中定义函数f,对函数f进行非线性最优化
函数f定义可见附图
始终q为四元数(用来表示旋转矩阵),t表示平移向量,R表示旋转矩阵
要优化的元素为q,t(即旋转矩阵和平移向量)
这里如何求解真是不懂,请各位赐教 help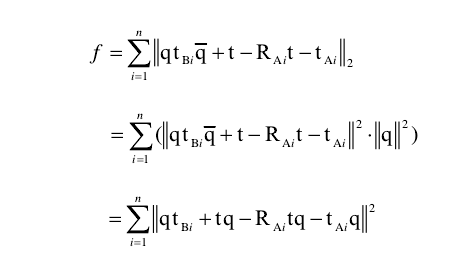

有关非线性最优化手眼标定的求助帖

- 写回答
- 好问题 0 提建议
- 关注问题
 分享
分享- 邀请回答
-

1条回答 默认 最新
- 2023-07-13 22:36狗头狗不狗的博客 最近由于组内的相关工作需求,需要进行机器人的高精度标定。原始的标定精度在6mm左右,虽然听起来是非常微小的偏差,但是由于研究方向手术机器人对精度要求极高。且在运动过程中,深度信息误差、畸变误差、机械误差...
- 2024-10-15 20:27手眼标定方法通常分为两种:一种是基于非线性优化的标定方法,如Tsai-Lenz算法;另一种是基于线性系统的标定方法,如张正友标定法。它们各有优劣,选择哪一种方法往往取决于具体的应用场景和需求。在本项目中,我们...
- 2017-06-15 20:403. **迭代优化**:最后一步是通过非线性优化算法对所有估计的参数进行微调,以提高标定结果的准确性。 #### 应用场景 - **工业自动化**:在精密装配、质量检测等领域,手眼标定技术能够帮助机器人精确抓取零件或...
- 2026-03-19 22:01Linus_2301的博客 线激光传感器扫过圆柱体时,会在传感器坐标系下获得一系列圆弧点云。圆柱体的轴线在空间中是一条直线。当机器人带着传感器从不同角度扫描...通过建立观测点到圆柱表面的距离模型,我们可以通过最优化算法反推手眼矩阵。
- 2021-08-12 23:18首先,通过将手眼标定问题转化为对偶四元数的参数化形式,可以将原本复杂的非线性问题转化为更易于处理的线性问题。接着,利用奇异值分解(SVD)来求解旋转部分的手眼标定矩阵,SVD是一种有效的矩阵分解技术,能够找到...
- 2021-05-24 18:451. **标定流程**:首先,介绍手眼标定的一般步骤,可能包括准备标定物体(如棋盘格),采集不同角度下的图像,然后运用计算机视觉算法找到棋盘格角点,最后通过非线性优化方法(如Levenberg-Marquardt算法)求解相机...
- 2025-05-25 22:31小桉桉冲吖的博客 因为一直使用6轴协作机器人,且主要应用是三维视觉,平常的手眼标定基本都是基于OpenCV来计算的,听说有九点标定和十二点标定,顺便了解下。
- 2024-04-17 10:573. **非线性优化**:由于标定过程通常是一个高度非线性的问题,因此通常采用非线性优化算法,如Levenberg-Marquardt算法,来迭代求解最优解,以减小实际测量值与理论计算值之间的误差。 4. **Excel数据处理**:在...
- 2023-10-24 20:31PaQiuQiu的博客 3)初始化标定模型 2、构建坐标系 1)构建标定板坐标系 2)构建机器人基座坐标系与夹具坐标系 3、执行手眼标定 1)检查用于手眼标定的位姿是否一致 2)进行手眼标定并保存相关参数 3)显示标定误差 4、显示标定后的...
- 2025-07-22 16:23X-Vision的博客 摘要: 手眼标定是连接机器人与3D视觉系统的关键技术,用于建立相机与机器人基座/工具间的精确坐标转换。流程包括:1)硬件准备(工业机器人、3D相机、高精度标定板等);2)环境搭建(均匀照明、稳定支架);3)...
- 2018-12-05 18:24在这个程序中,可能会使用到Matlab的内置函数,如线性代数运算、曲线拟合、最小二乘法等,来解决非线性方程组并求得最优解。 "说明.txt"文件可能是对整个手眼标定过程的详细解释,包括步骤、参数设置、预期结果和...
- 2025-11-06 07:19play7的博客 本文详细介绍了提升机械臂手眼标定精度的关键方法与技巧,包括标定前的准备工作、高质量数据采集、算法选择与参数优化、标定结果验证以及常见问题排查。通过避免常见错误并采用优化策略,工程师可以获得更可靠的标定...
- 2020-08-22 21:00Galaxy_Robot的博客 手眼标定详解 研究现状 所谓手眼标定是统一视觉系统和机器人的坐标系,从而可以使视觉系统所确定的物体位姿可以转换到机器人坐标系下,由机械臂完成对物体的作业。 最常见的手眼系统包括Eye-to-Hand和Eye-in-Hand两...
- 2024-02-28 21:34探路者tlz的博客 相机标定,手眼标定
- 2025-10-18 00:35terraform7cloud的博客 本文详细解析了深度相机手眼标定的全流程,重点探讨了如何通过优化TCP标定、手动计算深度与彩色点云对齐矩阵以及设计棋盘格摆放策略来系统性提升标定精度。文章提供了从误差根源分析到实战操作的完整指南,旨在帮助...
- 2025-12-18 17:52头发还很茂密的博客 基于非线性优化的机械臂手眼标定精度提升方案: 该方案不仅仅是计算一个结果,而是通过高精度视觉提取与全局数学建模,提取出最真实的坐标转换关系 1. 核心问题:为什么传统标定不够准? 在向客户介绍前,先说明...
- 2026-02-10 22:46rainbow6889的博客 非线性优化方法 (如 Ceres Solver, g2o): 特点: 将手眼标定建模为一个非线性优化问题。目标函数定义为所有运动数据下 $|\mathbf{A}_i \mathbf{X} - \mathbf{X} \mathbf{B}_i|$ (或类似度量) 的平方和最小。使用...
- 2025-10-10 13:26AI²OT的博客 手眼标定是机器人视觉引导的核心技术,用于建立机器人坐标系与相机坐标系之间的转换关系。主要分为眼在手外(相机固定)和眼在手上(相机随机械臂移动)两种构型。标定前需完成相机内参标定以消除畸变。标定过程包括...
- 2025-12-17 01:37ChenAI_TGF的博客 手眼标定技术原理与应用 手眼标定是解决机器人视觉系统中相机与机械臂坐标系转换的关键技术,主要分为Eye-in-Hand和Eye-to-Hand两种架构。前者相机安装在机械臂末端,后者相机固定于外部。两种架构都通过构建坐标...
- 2024-10-26 22:28我想要身体健康的博客 *手眼标定(Hand-Eye Calibration)**是机器人领域中常用的一种技术,用于确定摄像头与机械臂末端(即手臂末端执行器或夹具)之间的关系。这种标定方法在机器人视觉引导操作中非常重要,因为它能够精确地将摄像头...
- 没有解决我的问题, 去提问

