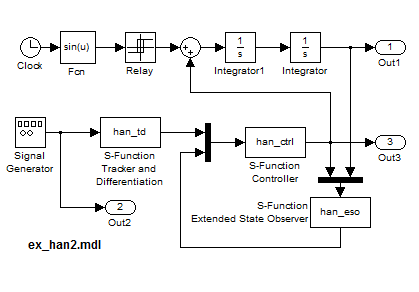
这是用s-function做的自抗扰控制,请大神指教一下,图中被控对象传递函数体现在哪里啊?

自抗扰控制simulink仿真中的一些问题

- 写回答
- 好问题 0 提建议
- 追加酬金
- 关注问题
 分享
分享- 邀请回答
-


1条回答 默认 最新

- 2021-09-23 22:05回答 1 已采纳 你好,这个需要先用sum元件,然后集成到一起再用sign元件,最后用gain元件乘以Lv之后就是你的v
- 2021-10-05 18:13回答 1 已采纳 两种方式可以实现: 如果只需要离线分析,可以将信号输出到matlab,然后用m文件编程实现,如下即可 t1 = t(y<=0); % t为时间,y为这个递减信号,t与y一一对应 t0 =
- 2023-04-10 15:39回答 3 已采纳 Simulink 是一个流程图形式的编程环境,可以用于模拟和设计各种系统和控制算法。在 Simulink 中,你可以通过拖放模块并连接它们来创建模型,而不需要编写代码。 如果你需要编写代码来实现某些特
- 2017-11-02 09:37ADRC自抗扰控制simulink仿真程序,包含simulink仿真框图及代码,可以运行。
- 2023-02-05 17:52回答 2 已采纳 答案引用CHATGPT 如果有帮助请点个采纳可以尝试以下几种方法来改善模型的补偿效果: 评估控制算法的设计,检查是否存在任何错误或缺陷。调整电容器的配置,以更好地补偿三相电流。对电力系统的数据进行更精
- 2022-10-11 18:02回答 3 已采纳 size位置的 -1 改为 [2] 就可以了。如有帮助,还请采纳!谢谢!
- 2022-06-25 20:52回答 1 已采纳 1.失真是因为设置的步长是无限循环小数。但步长需要设置为周期的整数倍分之一,否则也会失真。所以频率为12e3的三角波无论怎么设置都会失真的。2.因为你选择的是==2,也就是只有等于2的时候才会输出1,
- 2019-08-09 09:49自抗扰控制器的simulink仿真 参考韩京清的"自抗扰控制技术
- 2019-10-14 18:48回答 2 已采纳 最近在仿真三相交流调压电路,刚好碰到这个问题。 之前也是仿真时长不一样,结果波形不一样,通过调节仿真步长已经解决。
- 2021-11-12 17:00回答 1 已采纳 这应该是最基础的自动控制题目,给个第一问的结果,第2问你按照我的提示再去摸索。 a = 1; h = 28; % 学号 h2 = 8; b = 2; % 班级号 % 传递函数 Gs = tf(
- 2021-11-28 15:31回答 1 已采纳 你自己找到source,然后sine,然后给定三种不同频率相位,最后相加用add,然后再加一个gain的增益最后用个scope就行
- 2022-04-22 23:11适用于初学者的ADRC仿真模型,可直接调试,仿真,便于新人入门学习
- 2019-10-08 09:31回答 1 已采纳 https://wenku.baidu.com/view/41350dbff121dd36a32d8217.html
- 2022-04-13 21:29永磁同步电机(PMSM)的自抗扰控制(ADRC)simulink仿真程序,MATALB2015b以上都能正常运行,参数已调节。内涵资料,对simulink各模块怎么搭建及原理做详细介绍,同时附模型搭建的参考文献。应付大作业、本科毕设等...
- 2022-05-19 08:28基于ADRC自抗扰控制器的simulink仿真,包括ESO,TD等模块+含代码操作演示视频 运行注意事项:使用matlab2021a或者更高版本测试,运行里面的Runme.m文件,不要直接运行子函数文件。运行时注意matlab左侧的当前文件夹...
- 2022-07-14 20:09提供了稳定的自抗扰控制结构框图和仿真数据分析研究,方便学生做simulink仿真,学习自抗扰控制!
- 2022-04-13 21:46自抗扰控制仿真实例汇总,很全,都有详细仿真程序和相应技术资料,自抗扰控制学习入门利器
- 2020-01-31 09:53一阶线性自抗扰simulink仿真R2012a版
- 没有解决我的问题, 去提问


悬赏问题
- ¥100 Jenkins自动化部署—悬赏100元
- ¥15 关于#python#的问题:求帮写python代码
- ¥20 MATLAB画图图形出现上下震荡的线条
- ¥15 关于#windows#的问题:怎么用WIN 11系统的电脑 克隆WIN NT3.51-4.0系统的硬盘
- ¥15 perl MISA分析p3_in脚本出错
- ¥15 k8s部署jupyterlab,jupyterlab保存不了文件
- ¥15 ubuntu虚拟机打包apk错误
- ¥199 rust编程架构设计的方案 有偿
- ¥15 回答4f系统的像差计算
- ¥15 java如何提取出pdf里的文字?