A31s平台,gc2035驱动探测成功了,
[ 2.468787] [camera_print][list][L399]try to detect gc2035 ...
[ 2.469733] [camera_print][list][L417]detect gc2035 success!!
但是注册没成功,报错信息为: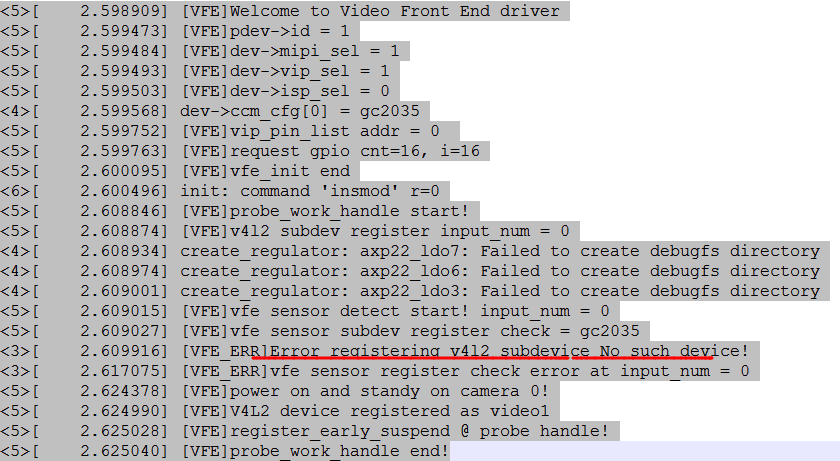
有见过的朋友吗?

gc2035摄像头驱动报错问题

- 写回答
- 好问题 0 提建议
- 关注问题
 分享
分享- 邀请回答
-

1条回答 默认 最新
- 2025-10-09 00:24月月光659的博客 本文详细介绍了在RV1126平台上适配GC2053摄像头驱动的完整实战流程。内容涵盖从硬件连接、内核驱动与DTS设备树配置,到上电调试、问题排查,最终实现通过VLC播放器成功拉取RTSP视频流的全过程。文章重点解析了RV1126...
- 2018-02-05 17:25旧时旅人的博客 1.1 常见编译报错: sensorlist.cpp:vtable for NSFeature::RAWSensorInfo: error: undefined reference to 'NSFeature::RAWSensorInfo::impGetDefaultData(CAMERA_DATA_TYPE_ENUM, void*, unsigned int) const'(1...
- 2023-03-01 11:07xpp012的博客 海思3518, 国科7202, IPC,GC2053,RLT8822 系统驱动调试
- 2025-10-24 00:24sprite的博客 本文提供了K230开发板...从解读错误码入手,详细讲解了硬件连接检查、固件版本核对、驱动配置以及代码级资源管理(如多通道配置与缓冲区分配)的完整解决方案,帮助开发者高效定位并解决摄像头初始化与图像捕获问题。
- 2025-08-26 06:40Star的博客 本文详细介绍了在RK3568平台上适配MIPI ...从硬件连接到软件环境搭建,深入解析了V4L2框架原理,并重点讲解了设备树(DTS)配置与驱动代码的编写与调试方法,为嵌入式开发者提供了从零到一实现摄像头驱动的清晰指南。
- 2025-08-24 02:58松山湖精神小伙的博客 本文介绍了在Luckfox Pico开发板上调试GC2053摄像头的详细过程。首先通过转接板解决20pin与24pin接口不匹配的问题。随后在SDK中配置内核模块,修改设备树文件,设置正确的I2C地址和复位引脚。调试中发现需同步拷贝...
- 2023-05-15 16:13daisy.skye的博客 daisy.skye的博客_CSDN博客-嵌入式,Qt,Linux...kernel没有报错,正常驱动摄像头并打开,也能读取id但是没有预览成像。daisy.skye擅长嵌入式,Qt,Linux,等方面的知识。xml配置和设备树配置中关于cis的配置不一致引起的。
- 2025-12-09 15:51mqtt6iot的博客 本文系统讲解S3摄像头模组黑屏问题的分层排查方法,涵盖电源、I2C通信、MCLK时钟、同步信号及时序、设备树与驱动协同等关键环节,结合实战案例提供可操作的调试步骤和验证手段,帮助快速定位并解决嵌入式平台摄像头...
- 2025-10-16 04:15whisky的博客 本文详细介绍了迈德威视MV-SUA133GC-T工业相机在Linux系统下的驱动安装全流程。从系统环境准备、驱动SDK获取、安装脚本运行,到核心库文件手动配置及常见问题排查,提供了清晰、实用的步骤指南,帮助用户顺利完成...
- 2025-10-31 10:22键盘侠预备役979的博客 本文针对立创K230(庐山派)开发板搭配GC2093摄像头的常见配置问题,提供了详细的避坑指南。文章基于实测,重点解析了帧率与分辨率不匹配、像素格式设置错误、多通道资源冲突、TF卡写入失败以及镜像翻转设置不当这五...
- 没有解决我的问题, 去提问
