
我用cmake编译x86的库产生如下错误
而编译x64的库却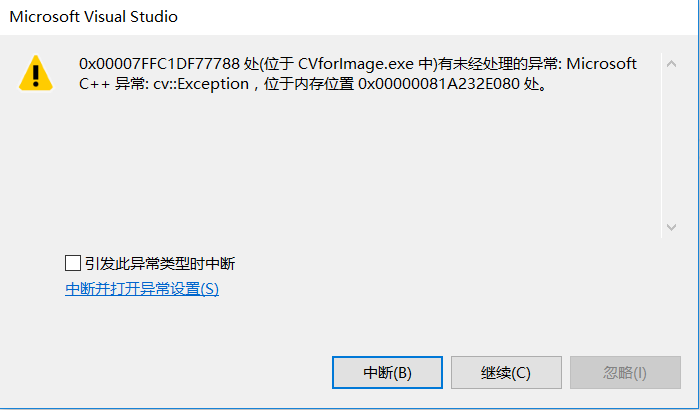
使用的代码为opencv内的video_homography.cpp代码。
怎么办???
/*
- video_homography.cpp *
- Created on: Oct 18, 2010
- Author: erublee */
#include "opencv2/calib3d.hpp"
#include "opencv2/videoio.hpp"
#include "opencv2/highgui.hpp"
#include "opencv2/imgproc.hpp"
#include "opencv2/features2d.hpp"
#include "opencv2/xfeatures2d.hpp"
#include
#include
#include
using namespace std;
using namespace cv;
using namespace cv::xfeatures2d;
static void help(char **av)
{
cout << "\nThis program demonstrated the use of features2d with the Fast corner detector and brief descriptors\n"
<< "to track planar objects by computing their homography from the key (training) image to the query (test) image\n\n" << endl;
cout << "usage: " << av[0] << " \n" << endl;
cout << "The following keys do stuff:" << endl;
cout << " t : grabs a reference frame to match against" << endl;
cout << " l : makes the reference frame new every frame" << endl;
cout << " q or escape: quit" << endl;
}
namespace
{
void drawMatchesRelative(const vector& train, const vector& query,
std::vectorcv::DMatch& matches, Mat& img, const vector& mask = vector<
unsigned char> ())
{
for (int i = 0; i < (int)matches.size(); i++)
{
if (mask.empty() || mask[i])
{
Point2f pt_new = query[matches[i].queryIdx].pt;
Point2f pt_old = train[matches[i].trainIdx].pt;
cv::line(img, pt_new, pt_old, Scalar(125, 255, 125), 1);
cv::circle(img, pt_new, 2, Scalar(255, 0, 125), 1);
}
}
}
//Takes a descriptor and turns it into an xy point
void keypoints2points(const vector<KeyPoint>& in, vector<Point2f>& out)
{
out.clear();
out.reserve(in.size());
for (size_t i = 0; i < in.size(); ++i)
{
out.push_back(in[i].pt);
}
}
//Takes an xy point and appends that to a keypoint structure
void points2keypoints(const vector<Point2f>& in, vector<KeyPoint>& out)
{
out.clear();
out.reserve(in.size());
for (size_t i = 0; i < in.size(); ++i)
{
out.push_back(KeyPoint(in[i], 1));
}
}
//Uses computed homography H to warp original input points to new planar position
void warpKeypoints(const Mat& H, const vector<KeyPoint>& in, vector<KeyPoint>& out)
{
vector<Point2f> pts;
keypoints2points(in, pts);
vector<Point2f> pts_w(pts.size());
Mat m_pts_w(pts_w);
perspectiveTransform(Mat(pts), m_pts_w, H);
points2keypoints(pts_w, out);
}
//Converts matching indices to xy points
void matches2points(const vector<KeyPoint>& train, const vector<KeyPoint>& query,
const std::vector<cv::DMatch>& matches, std::vector<cv::Point2f>& pts_train,
std::vector<Point2f>& pts_query)
{
pts_train.clear();
pts_query.clear();
pts_train.reserve(matches.size());
pts_query.reserve(matches.size());
size_t i = 0;
for (; i < matches.size(); i++)
{
const DMatch & dmatch = matches[i];
pts_query.push_back(query[dmatch.queryIdx].pt);
pts_train.push_back(train[dmatch.trainIdx].pt);
}
}
void resetH(Mat&H)
{
H = Mat::eye(3, 3, CV_32FC1);
}
}
int main(int ac, char ** av)
{
if (ac != 2)
{
help(av);
return 1;
}
Ptr<BriefDescriptorExtractor> brief = BriefDescriptorExtractor::create(32);
VideoCapture capture;
capture.open(atoi(av[1]));
if (!capture.isOpened())
{
help(av);
cout << "capture device " << atoi(av[1]) << " failed to open!" << endl;
return 1;
}
cout << "following keys do stuff:" << endl;
cout << "t : grabs a reference frame to match against" << endl;
cout << "l : makes the reference frame new every frame" << endl;
cout << "q or escape: quit" << endl;
Mat frame;
vector<DMatch> matches;
BFMatcher desc_matcher(brief->defaultNorm());
vector<Point2f> train_pts, query_pts;
vector<KeyPoint> train_kpts, query_kpts;
vector<unsigned char> match_mask;
Mat gray;
bool ref_live = true;
Mat train_desc, query_desc;
Ptr<FastFeatureDetector> detector = FastFeatureDetector::create(10, true);
Mat H_prev = Mat::eye(3, 3, CV_32FC1);
for (;;)
{
capture >> frame;
if (frame.empty())
break;
cvtColor(frame, gray, COLOR_RGB2GRAY);
detector->detect(gray, query_kpts); //Find interest points
brief->compute(gray, query_kpts, query_desc); //Compute brief descriptors at each keypoint location
if (!train_kpts.empty())
{
vector<KeyPoint> test_kpts;
warpKeypoints(H_prev.inv(), query_kpts, test_kpts);
//Mat mask = windowedMatchingMask(test_kpts, train_kpts, 25, 25);
desc_matcher.match(query_desc, train_desc, matches, Mat());
drawKeypoints(frame, test_kpts, frame, Scalar(255, 0, 0), DrawMatchesFlags::DRAW_OVER_OUTIMG);
matches2points(train_kpts, query_kpts, matches, train_pts, query_pts);
if (matches.size() > 5)
{
Mat H = findHomography(train_pts, query_pts, RANSAC, 4, match_mask);
if (countNonZero(Mat(match_mask)) > 15)
{
H_prev = H;
}
else
resetH(H_prev);
drawMatchesRelative(train_kpts, query_kpts, matches, frame, match_mask);
}
else
resetH(H_prev);
}
else
{
H_prev = Mat::eye(3, 3, CV_32FC1);
Mat out;
drawKeypoints(gray, query_kpts, out);
frame = out;
}
imshow("frame", frame);
if (ref_live)
{
train_kpts = query_kpts;
query_desc.copyTo(train_desc);
}
char key = (char)waitKey(2);
switch (key)
{
case 'l':
ref_live = true;
resetH(H_prev);
break;
case 't':
ref_live = false;
train_kpts = query_kpts;
query_desc.copyTo(train_desc);
resetH(H_prev);
break;
case 27:
case 'q':
return 0;
break;
}
}
return 0;
}







