fs=0.065;
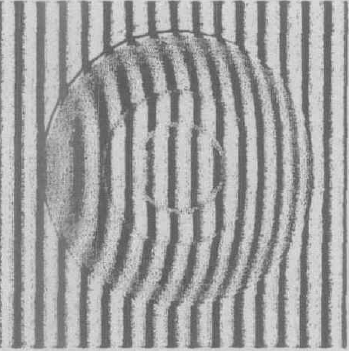
Q=imread('F:\MATLAB2014A\图片变换\结构光实验\参考面.png');
I=rgb2gray(Q);
figure(1);
% subplot(3,3,1);
imshow(I);
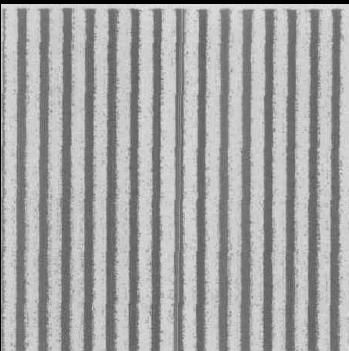
R=imread('F:\MATLAB2014A\图片变换\结构光实验\物体表面.png');
G=rgb2gray(R);
figure(2);
% subplot(3,3,2);
imshow(G);
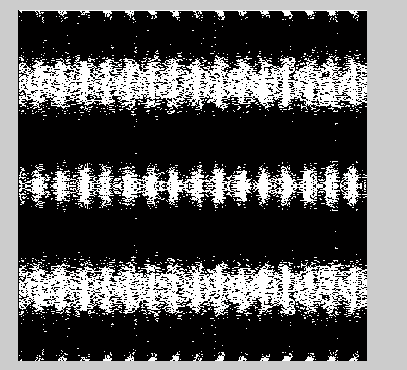
FW=fft(I);
% FW1=abs(FW);
figure(3);
% subplot(3,3,3);
imshow(FW);
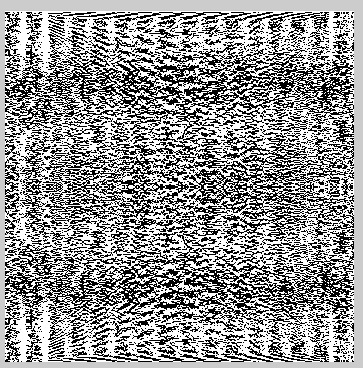
GW=fft(G);
% GW1=abs(GW);
figure(4);
% subplot(3,3,4);
imshow(GW);
Fb=FW-GW;
TW=ifft(Fb);
figure(5);imshow(Fb);
QW=ifft(Fb);
figure(6);imshow(QW);%对频域相减后空域
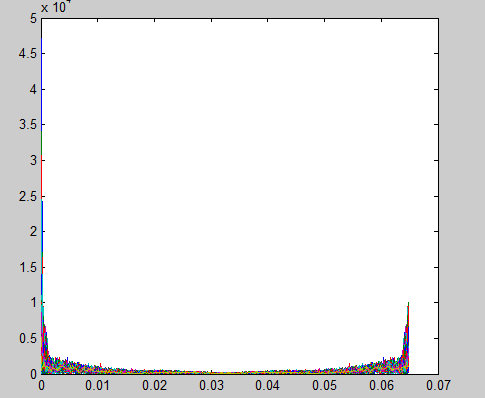
mag=abs(Fb);%求解相减后幅值
f=(0:351-1)*fs/351;%横坐标频率的表达式为f=(0:M-1)*Fs/M;
% TW=ifft(mag);
% figure(7);
plot(f,mag);%做频谱图
% subplot(3,3,5);
figure(8);
imshow(TW);
% W=G-I;
% subplot(3,3,6);imshow(W);
% % 正弦光栅
% clc;close all;clear all;
% f=0.065;%频率为0.125
% for i=1:800
% for j=1:800
% Img(i,j)=0.5+0.5*cos(2*pi*f*j);
% end
% end
% figure(1);imshow(Img,[]);
附上程序和图片,我想知道怎么提取其中的折叠相位,我求的是频谱,求大神帮忙看看.....