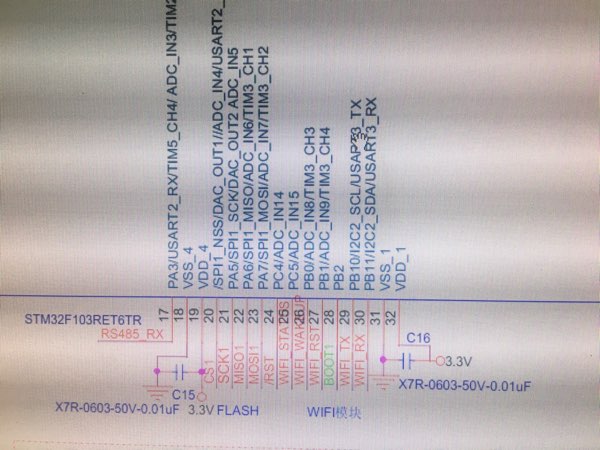
大家好,最近碰到一个问题想跟大家讨论一下。如图,flash 的cs引脚连到CPU的spi1_nss引脚,问题来了,如何将cs引脚拉低?(除了使用GPIO直接置位)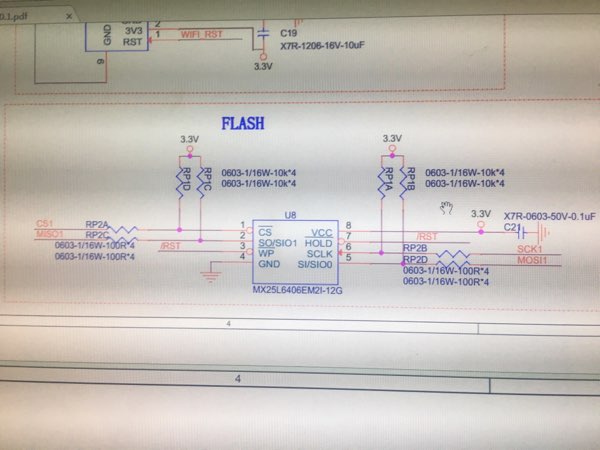

关于stm32中的spi1_nss功能

- 写回答
- 好问题 0 提建议
- 关注问题
 分享
分享- 邀请回答
-

1条回答 默认 最新

- 2021-10-01 13:40在本项目中,我们关注的是如何使用STM32F103C8T6通过硬件SPI接口来驱动ST7789显示屏。 ST7789是一款小巧、低功耗的TFT液晶显示控制器,常用于小型智能设备和嵌入式系统中的彩色屏幕。它支持SPI接口,可以高效地传输...
- 2022-03-06 22:51Potatotatotato的博客 NSS:从器件选择,即可作输入也可作输出。主机(master)利用此引脚选择需要通信的从机(slave)。
- 2022-09-21 17:39STM32_SPI.zip_STM32_SPI_stm32 spi是一个关于STM32微控制器的SPI(Serial Peripheral Interface)通信的资源包。STM32系列是意法半导体(STMicroelectronics)开发的一系列高性能、低功耗的微控制器,广泛应用于...
- 2021-09-30 03:31总的来说,STM32F103-SPI程序涉及了嵌入式系统开发中的硬件接口设计、通信协议理解、微控制器外设操作等多个方面,需要对C语言编程、嵌入式系统和STM32 HAL库有深入的了解。通过这样的实践,开发者能够熟练掌握SPI...
- 2021-09-29 10:01在本项目"20200114 STM32-SPI1_复旦微电子EEPROM_spi_stm32_复旦微电子_EEPROMSTM32_eepr"中,重点是使用STM32通过SPI(Serial Peripheral Interface)接口与复旦微电子的EEPROM进行通信。SPI是一种同步串行通信协议...
- 2019-10-19 08:26总结来说,这个压缩包中的资源应该包含了一个完整的STM32L4xx芯片硬件SPI配置示例,通过LL库实现SPI的初始化、收发函数等核心功能。开发者可以参考这些代码,结合自己的项目需求进行定制和优化。对于想要深入理解和...
- 2022-09-21 17:31在STM32系列微控制器中,SPI功能强大且灵活,可以满足多种高速数据传输需求。本文将深入探讨STM32 SPI通信的基本原理以及如何在实际项目中实现。 首先,SPI通信协议是基于主从模式的全双工通信方式,由一个主设备...
- 2022-09-24 19:13STM32是一款基于ARM Cortex-M3内核的微控制器,被广泛应用在嵌入式系统设计中,尤其是在SPI(Serial Peripheral Interface)通信方面。SPI是一种同步串行通信接口,常用于连接多个外设,如传感器、显示器、存储器等...
- 2021-10-01 00:530.96英寸LCD显示屏与STM32F030微控制器通过SPI接口通信的例程,是嵌入式系统开发中的一个常见应用场景。在这个例程中,我们将深入探讨如何利用STM32F030的SPI接口驱动0.96英寸的液晶显示屏,以及在编程过程中需要...
- 2021-09-30 07:51总的来说,这个项目涉及到STM32F103微控制器的SPI主设备功能、FPGA的SPI从设备实现以及Verilog编程技巧。通过这样的通信方式,你可以实现STM32和FPGA之间的灵活数据交换,适应不同的应用需求。在实际工程中,这样的...
- 2022-07-14 11:22在STM32中,SPI功能可以通过不同的GPIO引脚配置实现,通常包括SCK(时钟)、MISO(主设备输入,从设备输出)、MOSI(主设备输出,从设备输入)和NSS(片选信号)。 对于TF卡,它是SD卡的微型版本,遵循SD卡协议。在...
- 2022-09-19 22:33在本项目"SPI-FLASH.rar"中,开发者已经实现了一个通过SPI接口与STM32F103进行通信的SPI闪存读写程序,具备处理整数和小数的读写功能。 1. **STM32F103的SPI接口** STM32F103系列MCU具有多个SPI接口,通常包括SPI1...
- 2022-09-19 21:14SPI配置是STM32开发中的重要环节,本资源包含了一个关于STM32 SPI配置的示例代码,对于理解和实践STM32 SPI通信有极大的帮助。 在STM32中,SPI接口主要由以下组件构成: 1. **SPI时钟源(SCK)**:主设备(Master...
- 2022-09-21 22:00STM32F103系列微控制器是基于ARM Cortex-M3内核的高性能微处理器,广泛应用在嵌入式系统设计中。SPI(Serial Peripheral Interface)是一种串行通信接口,常用于连接微控制器与各种外设,如传感器、A/D转换器、...
- 2022-09-24 23:24STM32_SPI.rar 文件主要关注的是STM32微控制器家族中的SPI(Serial Peripheral Interface)通信协议的使用,特别是在STM32F03和STM32F103型号上的实现和调试。SPI是一种同步串行通信接口,常用于连接微控制器和各种...
- 2021-09-10 19:31STM32是一款基于ARM Cortex-M内核的微控制器,广泛应用于各种嵌入式系统中,其丰富的GPIO(General Purpose Input/Output)引脚为开发者提供了极大的灵活性。在某些情况下,我们可能需要使用GPIO来模拟SPI(Serial ...
- 2021-09-29 00:00SPI(Serial Peripheral Interface)是一种全双工、同步串行通信接口,广泛应用于嵌入式系统中,例如STM32F103微控制器。在这个STM32F103平台上实现SPI传输,需要理解SPI的基本原理,配置相关寄存器,并进行中断或...
- 2022-07-15 01:27在实验中,这个驱动代码已经过验证,能够正确地工作,意味着STM32F1能够成功地通过硬件SPI与TM7707建立通信,并实现所需的功能。对于开发者来说,这个驱动代码可以作为一个基础模板,根据实际项目需求进行调整和扩展...
- 2022-09-24 09:01在这个"SPI.rar_STM32F4 SPI_spi.c"的压缩包中,我们主要探讨的是STM32F4如何通过SPI接口进行通信,并重点分析"spi.c"和相关的头文件。 1. **SPI总线协议**: SPI通信采用主从模式,通常有一个主设备控制数据传输...
- 没有解决我的问题, 去提问

