
简述: 双目测距,测距目标是一个贴在墙上的正方形,已经通过张氏标定得出了内外参数。但是无法确定如何选取世界坐标系以及相应的坐标。
1、问题:单目标定棋盘,世界坐标系设定于棋盘上,世界坐标系的原点选择棋盘的固定一角,那在双目测距中,世界坐标系怎么选定?有人说选在左相机光心,如果这样选定如何确定公式中的Xw Yw 以及Zw,进而根据公式求出Zc。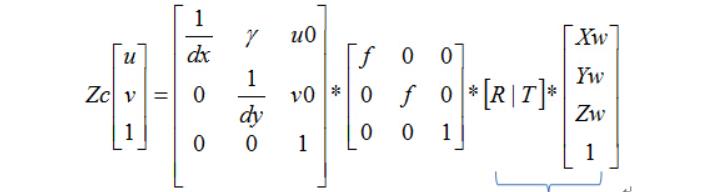
2、问题:在用stereo camera calibration toolbox标定完后点击按钮出现以下窗口,这个是三维重建吗?我们标定的棋盘的三维坐标和待测距离能从这个图中获取吗?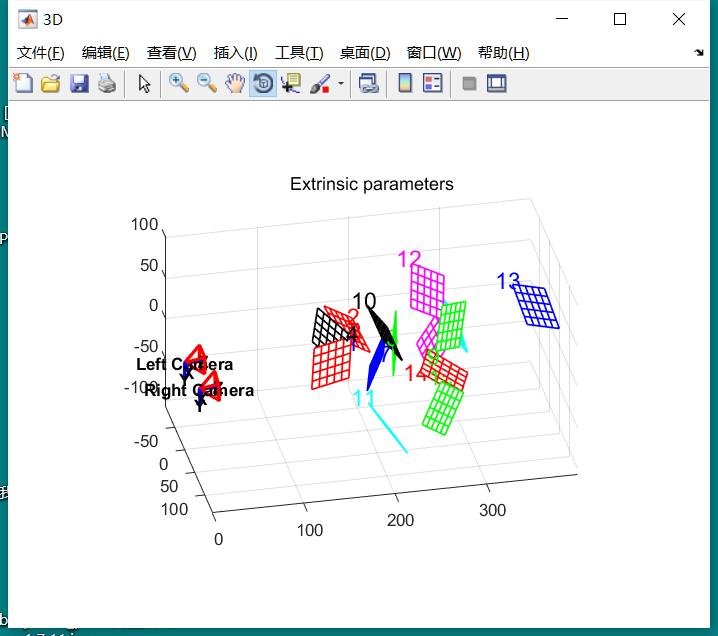
由于我和同学对计算机视觉不熟悉,目前疑点主要就是怎么拿着标定的内外参结果求距离,希望得到大家的帮助,谢谢!





