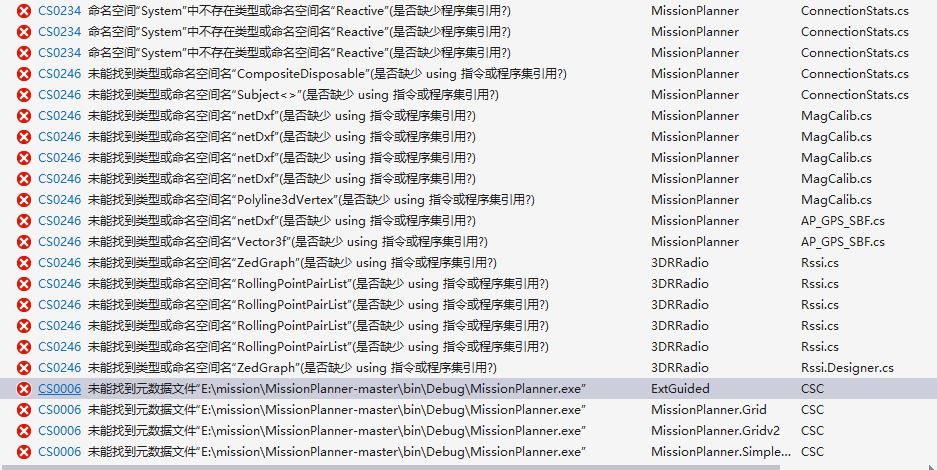
引用和框架也改了,引用途径也有更改,但还是有这些问题

运行mission planner遇到如下错误

- 写回答
- 好问题 0 提建议
- 关注问题
 分享
分享- 邀请回答
-

1条回答 默认 最新

- 2025-09-14 08:03rice5的博客 本文详细介绍了MissionPlanner二次开发中仿真环境的搭建与自动化测试实战。通过配置Python环境、安装dronekit-sitl、pymavlink和MAVProxy核心工具,逐步打通SITL仿真器、MAVProxy消息路由与MissionPlanner的连接链路...
- 2025-08-10 04:05wine的博客 本文详细指导了如何在Windows系统上从零开始搭建并配置Mission Planner与SITL仿真环境,实现无人机软件在环仿真的无缝对接。内容涵盖Cygwin、GCC、MAVProxy等核心组件的安装避坑指南、ArduPilot源码获取、环境配置,...
- 2021-09-03 19:01Shark_Pepper的博客 MissionPlanner编译流程及问题详解 一,介绍 MissionPlanner是一款基于C#开发的开源的地面站软件,主要用在Windows/Linux平台。MP使用广泛,提供了较为完善的功能,如飞行器设置,飞行任务规划,飞行监控和日志文件...
- 2021-10-24 14:31易时能的博客 MissionPlanner编译流程及问题详解 一,介绍 MissionPlanner是一款基于C#开发的开源的地面站软件,主要用在Windows/Linux平台。MP使用广泛,提供了较为完善的功能,如飞行器设置,飞行任务规划,飞行监控和日志文件...
- 2016-03-28 16:31阿木实验室的博客 软件下载: ...https://github.com/diydrones/MissionPlanner 同时声明本文是翻译APM官方论坛的文章,和尝试的结果。还有因为是开源的项目本身比较活跃,版本很多,这里不保证可以一定编译成功。英
- 2025-10-02 12:21薛迟的博客 MissionPlanner支持最多6种飞行模式(取决于固件类型,ArduCopter支持多达10种),但通常建议使用三档位开关进行基本配置:低位对应Stabilize(姿态稳定)、中位对应Loiter(定点悬停)、高位对应Auto。
- 2026-02-25 00:41谷文栋的博客 本文提供了在Windows系统下使用Visual Studio 2022编译MissionPlanner地面站软件的完整指南。重点解决了环境配置、Git子模块更新、NuGet包还原等常见编译难题,并分享了针对国内开发者的网络优化与Git配置技巧,帮助...
- 2025-11-22 08:53c6d7e8f9g的博客 本文详细介绍了在VS2022环境下编译Mission Planner地面站软件的完整流程,从环境配置、源码获取到成功运行的实战指南。特别针对编译过程中常见的内存不足、依赖项缺失等问题提供解决方案,帮助开发者高效完成无人机...
- 2026-03-11 00:08峰瑞资本的博客 本文提供了在Windows系统下从Git克隆到使用Visual Studio 2022成功编译MissionPlanner地面站的完整避坑指南。针对网络问题、子模块初始化失败、依赖项缺失等常见编译难题,给出了具体的修改方法和解决方案,帮助...
- 2025-10-25 00:06算法笑匠的博客 本文详细介绍了如何高效连接Mission Planner地面站与Autopilot飞控。从驱动安装、供电确认等前期准备,到USB直连、无线电遥测及网络连接等实战步骤,提供了全面的配置指南。文章重点解析了常见连接故障的排查方法,...
- 2025-01-11 15:52自动化小高的博客 解决MissionPlanner地面站源码编译无法打开FlightData设计器报错问题
- 2026-01-02 07:0513572025090的博客 当你在地图上添加一个航点,Mission Planner 内部会构建如下结构体,并通过 MISSION_ITEM 消息发送给飞控: mavlink_mission_item_t wp = { .target_system = sysid, .target_component = compid, .seq = 1, .frame ...
- 2020-07-06 08:29诗小涵.的博客 十一、舵面输出反向 对于固定翼飞机或者无人船,可能会遇到如下问题:遥控器各个通道设置正确,从地面站上看飞控接收的各个通道的方向也正确,但是某些舵面输出是反向的。这种问题往往是由于舵机实际运动方向与受控...
- 2026-01-09 19:12无形小手的博客 手把手教你完成Pixhawk飞控的ArduPilot固件烧录,涵盖所需工具、连接步骤与常见问题处理,确保飞行器稳定运行,是掌握ardupilot配置与调试的关键一步。
- 2025-12-25 04:37坑货两只的博客 在 Mission Planner 中配置如下: - GPS Type: UBX_M803 或 UBX_F9P - Baudrate: 115200 - Protocol: UBX only(减少无效帧解析开销) 双GPS冗余设计:让飞行更安全 ArduPilot 支持最多两个GPS模块同时工作。...
- 2025-12-18 03:56l1k9j8h7g6的博客 项目启动与变量使用 在脚本编程中,我们常常会遇到需要对文件进行操作的情况。例如,尝试使用变量来更改文件名称。下面是一个示例,我们试图将文件 myfile 重命名为 myfile1 : [me@linuxbox ~]$ filename="myfile...
- 2026-01-13 08:34Pella732的博客 起飞前记得开启: INS_LOG_BATMASK = 1 # 记录振动数据 LOG_BITMASK = 196607 # 启用 IMU 和 CTUN 日志 飞行结束后导出 .bin 日志,在 Mission Planner 的“Log Analysis”模块中查看 IMU.GyrN 的频谱图。...
- 2023-08-10 09:33注意,新版本的飞控固件在默认参数情况下,需要先在 mission planner 中设置好机架类型后才会有各个控制通道的输出。 b、加速度计校准(如果没有校准或者上次校准不成功,解锁时姿态窗口会提示); c、指南针校准...
- 2018-08-29 16:37魔城烟雨的博客 使用GCS地面站(Missionplanner)查看Pre-Arm错误信息 在 闪烁黄色灯 时,使用者会无法解锁,而且解锁时 蜂鸣器也会长鸣2下 。此时你必须连接上地面站,才能排除究竟是什么问题导致了不能解锁和飞行,一般通常是 ...
- 没有解决我的问题, 去提问

