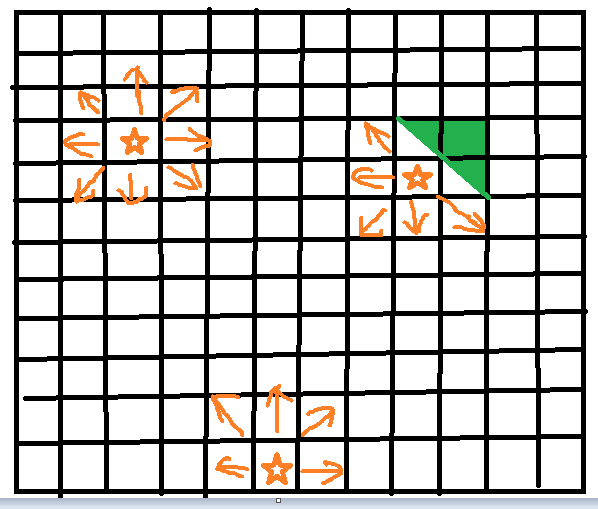
如图,在matlab中,五角星为一个要运动的物体,每一时刻,可以留在原地或者四周能运动的格子(不能超出范围),物体的当前位置为(x,y),那么,怎么便捷地构建上时刻t-1与当前时刻t可,机器人以可以运动到的格子之间的关系表示为:当前时刻可以到达的格子,grid(t) = R(grid(t-1)),怎么构建R方便点?

如图,在matlab中,五角星为一个要运动的物体,每一时刻,可以留在原地或者四周能运动的格子(不能超出范围),物体的当前位置为(x,y),那么,怎么便捷地构建上时刻t-1与当前时刻t可,机器人以可以运动到的格子之间的关系表示为:当前时刻可以到达的格子,grid(t) = R(grid(t-1)),怎么构建R方便点?
 分享
分享 虽然复杂了点,先构造一个方向矩阵,离散化地图,对当前点使用方向矩阵上下左右分别做比如(1,1),(1,-1)(-1,-1)(-1,1)操作
分享


