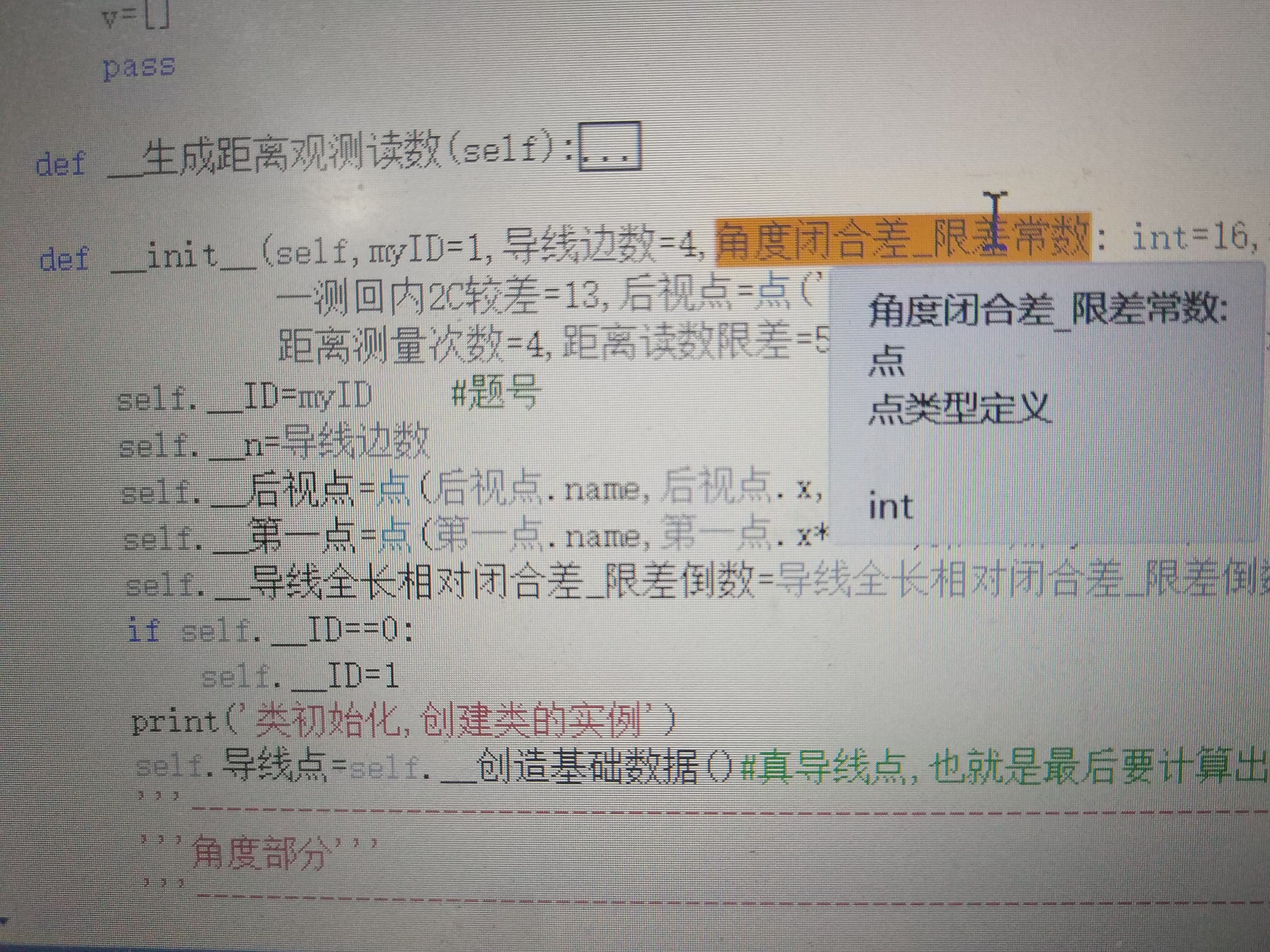
def init(self,myID=1,导线边数=4,角度闭合差_限差常数: int=16,测回数=1,同一方向值各测回较差=9,
一测回内2C较差=13,后视点=点('后视点',x坐标=0,y坐标=0),第一点=点('p1',x坐标=500,y坐标=500),
距离测量次数=4,距离读数限差=5,导线全长相对闭合差_限差倒数=10000):
self.__ID=myID #题号
self.__n=导线边数
self.__后视点=点(后视点.name,后视点.x,后视点.y)
self.__第一点=点(第一点.name,第一点.x*1000,第一点.y*1000)
self.__导线全长相对闭合差_限差倒数=导线全长相对闭合差_限差倒数
if self.__ID==0:
self.__ID=1
print('类初始化,创建类的实例')
self.导线点=self.__创造基础数据()#真导线点,也就是最后要计算出来的点的坐标
'''----------------------------------------------------------------------'''
'''角度部分'''
'''---------------------------------------------------------------------'''
print(角度闭合差_限差常数)
self.角度闭合差_限差=round(角度闭合差_限差常数*math.cos(myID)*math.sqrt(导线边数))

为什么我这个 角度闭合差_限差常数 给的是int, 为什么变成其他类型了?

- 写回答
- 好问题 0 提建议
- 关注问题
 分享
分享- 邀请回答
-

1条回答 默认 最新
 你知我知皆知 2024-08-07 13:35关注
你知我知皆知 2024-08-07 13:35关注以下回答参考 皆我百晓生、券券喵儿 等免费微信小程序相关内容作答,并由本人整理回复。
在Python中,
int是整型的数据类型。在数学表达式中,如果涉及到分数或者小数,通常会使用浮点数(float),而如果是一个简单的整数,则使用int。例如,在你的代码中,你尝试将一个整数值转换为浮点数,这可能会导致错误的结果。因此,为了保持一致性,你可以直接使用
int来表示整数值。例如:
distance_measurement_times = 4 distance_reading_limit_difference = 5 line_length_relative_closure_difference_inverse = 10000这样就不会出现
TypeError错误了。解决 无用评论 打赏举报 分享
- 2026-02-27 00:28长腿小姑娘的博客 通过Python从零实现一个包含隐藏层和非线性激活函数的MLP,不仅成功解决了XOR问题,还通过可视化决策边界和权重分析,直观展示了MLP如何通过非线性变换学习复杂模式。文章还探讨了网络容量、过拟合等实用技巧,并...
- 2025-10-13 09:20InitPulse的博客 常见抖动类型 机械开关弹跳:触点闭合瞬间产生毫秒级脉冲 电磁干扰:高频噪声导致ADC采样值突变 电源波动:电压不稳引发传感器输出漂移 软件滤波实现 采用滑动平均滤波法对连续采样值进行平滑处理: #define FILTER_...
- 2022-03-29 20:21【网络星空】的博客 photo:计算摄像学(Computational Photography)相关的接口,当然这只是个名字,其实只有图像修复和降噪而已。 stitching:图像拼接模块,有了它可以自己生成全景照片。 nonfree:受到专利保护的一些算法,其实...
- 2024-04-29 17:13RitasCake的博客 另外再聊聊学习Python函数,前面arange和linspace的时候我们提到了这一点。虽然开源赋予了Python强大的生命力,但缺少官方的规范,导致其过度自由。野蛮生长的结果就是混乱与无序,各个第三方库之间不兼容和和冲突的...
- 2025-07-07 15:34电院大学僧的博客 栈(Stack)是一种线性...基本操作Push(x):将元素x压入栈顶Pop():移除并返回栈顶元素:返回栈顶元素但不移除:判断栈是否为空isFull()(仅限固定容量栈):判断栈是否已满。
- 2025-08-10 14:13BaseLine001的博客 树莓派的Python编程
- 2025-11-01 14:58周不宅的博客 本文系统阐述了MDI_XFRMR在小智音箱差分音频传输中的应用,涵盖电路设计、PCB布局、阻抗匹配、共模抑制及实测验证方法,提出优化信号完整性与抗干扰能力的综合方案。
- 2024-03-14 12:01k笔墨丹青的博客 下面是np.uint8()函数的一些示例用法: 将一个数值转换为8位无符号整数类型: x = np.uint8(128) print(x) 输出:128 将一个列表转换为8位无符号整数类型的数组: y = np.uint8([10, 20, 30, 40, 50]) print(y) ...
- 2025-12-10 19:27new_dApple的博客 (1)预处理:为什么要滤波? 如果直接对灰度图二值化,图像中的小噪声(比如像素点的随机干扰)会被检测成「伪轮廓」,高斯滤波通过模糊图像能有效去除这类噪声,让轮廓更纯净。 (2)二值化:阈值的选择 示例中用...
- 2022-05-29 23:03杀生丸学AI的博客 文章目录前言一、图像基本操作1.数据读取-图像2.数据读取-视频3.颜色通道提取4.边界填充5.图像融合6.按比例缩放二、阈值与平滑处理1.阈值(灰度图)2.图像平滑三、图像形态学处理(腐蚀、膨胀)1....Python_whl:
- 2020-01-13 13:54Thomson617的博客 官网链接(英文版):... 第一章.OpenCV简介 了解如何在计算机上设置OpenCV-Python! 1.OpenCV-Python教程简介 1.1 OpenCV OpenCV是由Gary Bradsky于1999年在Intel公司创建的,第一次发布是在2000年。瓦...
- 2020-09-11 16:42自学AI的鲨鱼儿的博客 第二个为cv2.IMREAD_COLOR:读入彩色图像;cv2.IMREAD_GRAYSCALE:读入灰度图像。 2、显示图像cv2.imshow() 3、保存图像cv2.imwrite() 4、获取视频先创建一个videocapture对象。参数可以是设备索引号或视频文件。 ...
- 2025-01-16 10:04frimiku的博客 Pandas详解 一、Pandas介绍 数据分析三剑客之一的Pandas,是基于Numpy构建的,专门用于【数据处理和分析】的库。...其中,DataFrame的每一列都可以视为一个Series,这些Series共享相同的索引。 相互转换
- 2023-12-06 22:14小袁拒绝摆烂的博客 subok 默认返回一个与基类类型一致的数组 ndmin 指定生成数组的最小维度NumPy 数据类型 numpy 支持的数据类型比 Python 内置的类型要多很多,基本上可以和 C 语言的数据类型对应上,其中部分类型对应为 Python 内置...
- 2024-04-10 18:09k笔墨丹青的博客 下面是np.uint8()函数的一些示例用法: 将一个数值转换为8位无符号整数类型: x = np.uint8(128) print(x) 输出:128 将一个列表转换为8位无符号整数类型的数组: y = np.uint8([10, 20, 30, 40, 50]) print(y) ...
- 2024-11-22 11:30qq_41789503的博客 这是你第一次使用 Markdown编辑器 所展示的欢迎页。如果你想学习如何使用Markdown编辑器, 可以仔细阅读这篇文章,了解一下Markdown的基本语法知识。首先找到中间位置数据作为根节点,然后左边数组构建左子树,右边...
- 2025-09-28 10:15bp432的博客 热辐射 在高温下变得不可忽视,遵循斯特藩-玻尔兹曼定律: $$ q_{rad} = \varepsilon \sigma A (T_s^4 - T_\infty^4) $$ 其中 $ \varepsilon $ 为发射率,$ \sigma $ 为常数。黑色涂层鳍片可通过提升 $ \varepsilon...
- 2024-09-13 20:56The_xzs的博客 图像分割是计算机视觉中的一个重要步骤,其基本目标是将图像划分为若干个具有特定特征或意义的区域。每个区域内部的像素共享相似的属性,如颜色、纹理、亮度或深度。图像分割可以基于灰度、彩色、空间纹理和几何形状...
- 2024-06-01 17:49学网安的A的博客 【Python--openCV图像处理】Python学习-OpenCV图像处理基础超详细的学习笔记(黑马程序员课程-B站有视频)
- 没有解决我的问题, 去提问
