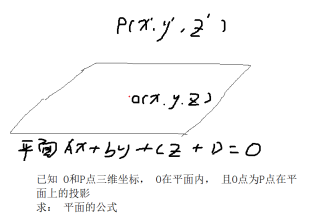
已知o,p两点的三维坐标,
且O为P点在某平面的投影,
求平面公式
方法或者python 代码等

已知o,p两点的三维坐标,
且O为P点在某平面的投影,
求平面公式
方法或者python 代码等
 分享
分享
 关注
关注思路如下:
求出两个垂直于向量op的不共线的向量v1和v2,根据这两个向量得到点p1和p2,加上o点,通过三点得到平面方程的4个参数。
# -*- coding: utf-8 -*-
import numpy as np
def get_ortho(op):
"""返回垂直于向量op的两个向量"""
if not op.any(): # 向量op的每一个元素都是0
return None
i = np.where(op!=0)[0][0] # 向量op的第1个不为0的元素的索引号
v1 = np.ones(op.shape, dtype=np.float64) # 构造一个元素全部为1的向量
v2 = np.arange(op.size, dtype=np.float64) # 构造一个元素递增的向量
v1[i] = 0 # 令第i个元素为0
v2[i] = 0 # 令第i个元素为0
v1[i] = -np.dot(op,v1)/op[i]
v2[i] = -np.dot(op,v2)/op[i]
return v1, v2
def get_plane_by_three_point(p1, p2, p3):
"""根据三点坐标返回平面方程"""
x1, y1, z1 = p1
x2, y2, z2 = p2
x3, y3, z3 = p3
a = (y2-y1)*(z3-z1) - (y3-y1)*(z2-z1)
b = (z2-z1)*(x3-x1) - (z3-z1)*(x2-x1)
c = (x2-x1)*(y3-y1) - (x3-x1)*(y2-y1)
d = a*x1 - b*y1 - c*z1
return a, b, c, d
def demo(o, p):
"""点o为点p在某平面的投影,计算该平面方程"""
o = np.array(o)
p = np.array(p)
op = p - o
v1, v2 = get_ortho(op)
p1 = o + v1
p2 = o + v2
a, b, c, d = get_plane_by_three_point(p1, p2, o)
print('%fx + %fy + %fz + %f = 0'%(a, b, c, d))
if __name__ == '__main__':
o, p = (0,0,0), (1,0,0)
demo(o, p)
o, p = (1,2,3), (3,5,2)
demo(o, p) 分享


