用Simulink自带的EKF模块做附着系数的估计,状态量是四个车轮的附着系数,观测量是纵向加速度,侧向加速度和横摆角速度,输入原本是前轮转角,但是提醒找不到8个归一化轮胎力,所以把8个归一化轮胎力也作为输入,前前后后调了好多次,就是出不来曲线,希望找个师父来指点一下,有偿的。
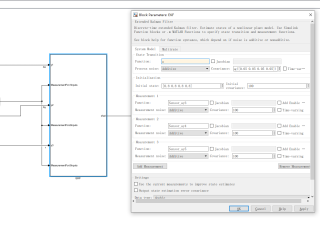

用Simulink自带的EKF模块做附着系数的估计,状态量是四个车轮的附着系数,观测量是纵向加速度,侧向加速度和横摆角速度,输入原本是前轮转角,但是提醒找不到8个归一化轮胎力,所以把8个归一化轮胎力也作为输入,前前后后调了好多次,就是出不来曲线,希望找个师父来指点一下,有偿的。
 分享
分享
 关注
关注让阿豪来帮你解答,本回答参考chatgpt3.5编写提供,如果还有疑问可以评论或留言为了帮助你解决这个问题,首先需要确认一些信息:
% 定义状态量、观测量和输入参数
states = 4; % 车轮的附着系数
measurements = 3; % 纵向加速度、侧向加速度和横摆角速度
inputs = 8; % 归一化轮胎力
% 初始化EKF模块
ekf = extendedKalmanFilter('NumStateVariables', states, 'NumMeasurableOutputs', measurements, 'NumInputs', inputs);
% 定义系统状态方程和观测方程(需要根据具体情况定义)
sysFcn = @(x, u) x + u; % 举例:简单的状态更新方程
measFcn = @(x) x(1:3); % 举例:从状态中提取出纵向加速度、侧向加速度和横摆角速度
% 设置EKF模块的参数
ekf.StateTransitionFcn = sysFcn;
ekf.MeasurementFcn = measFcn;
ekf.HasAdditiveProcessNoise = true;
% 模拟数据输入
u = zeros(inputs, 1); % 假设为0
% 开始仿真
simTime = 10; % 仿真时间
simStep = 0.1; % 步长
for t = 0:simStep:simTime
% 更新系统状态
x = ekf.State;
dx = u; % 根据具体情况更新
ekf.State = sysFcn(x, dx);
% 生成虚拟测量值
z = measFcn(ekf.State) + randn(measurements, 1) * 0.1; % 添加噪声
% 对EKF模块进行预测和更新
predict(ekf, u);
correct(ekf, z);
% 获得估计结果
estimatedStates = ekf.State;
% 其他操作
end
希望以上信息能够帮助你解决问题,如果仍然存在困难,建议向Simulink社区或其他专业平台寻求进一步帮助。祝你顺利解决问题!
分享


