
当前使用的时Ubuntu18, 运行的是ROS Melodic版本,gazebo 9. Node 文件用python 编写
运行的仿真机器人是 Turtlebot3-Waffle (export TURTLEBOT3_MODEL=waffle)
运行Client时,无法获取到 ModelStates的msg
def get_model_pose(model_name):
poll_rate = rospy.Rate(1)
for i in range(10):
model_states = rospy.wait_for_message('/gazebo/model_states', ModelStates, 1)
if model_name in model_states.name:
model_pose = model_states.pose[model_states.name.index(model_name)]
break
poll_rate.sleep()
else:
raise RuntimeError('Failed to get ' + model_name + ' model state')
return model_pose
运行roswtf显示
node subscriptions are unconnected:
/gazebo/set_model_state
/gazebo/set_link_state
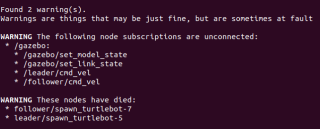 /gazebo/set_model_state unconnected
/gazebo/set_model_state unconnected
目前在网上没有搜到类似的情况
请问如何让我的client 获取到/gazebo/model_states
------------------分割线---------------------
刚才重装了gazebo9 还是没有解决
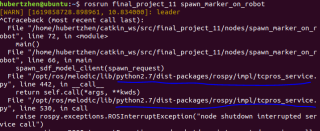
想问下是否因为 我的node 是用python 3编译,和ros的服务不兼容?






