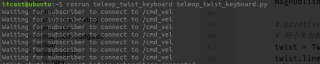
正常情况下不是应该teleop_twist_keyboard发布/cmd_vel的话题吗?为什么我这里会显示等待订阅/cmd_vel的话题呢?

正常情况下不是应该teleop_twist_keyboard发布/cmd_vel的话题吗?为什么我这里会显示等待订阅/cmd_vel的话题呢?
 分享
分享
本人所用环境配置:Ubuntu 20.04 + ROS Noetic
Problem: Waiting for subscriber to connect to /cmd_vel
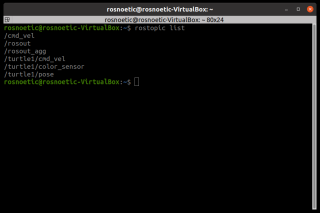
原因:乌龟 GUI 和 键盘控制 的话题不同
键盘控制发布的话题不是 /cmd_vel 而是 /turtle1/cmd_vel
解决:可以通过在 launch 文件中添加 remap 标签改变发布或订阅的话题,使两者话题一致:
<remap from = "/turtle1/cmd_vel" to = "/cmd_vel">
再启动 launch 文件,打开GUI界面,并执行
rosrun teleop_twitst_keyboard teleop_twist_keyboard
会显示新的操作提示界面:
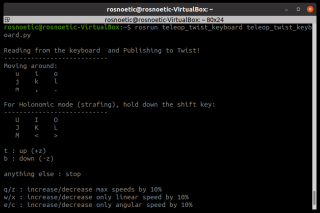
而后,便可以通过 提示的 key 控制 乌龟运动:
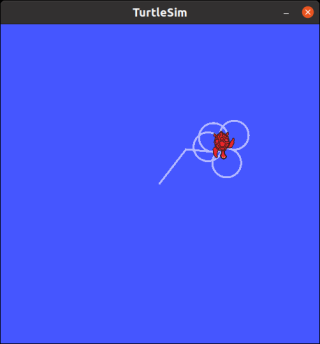
PS:操作确实更加丰富!
希望对你有帮助,祝好!
分享



