我基于STM32F10C8T6编了一个代码,即用串口发送数据给舵机,让舵机发生转动,但是我编了一套动作组,发现机器人直接就运行了一套动作组里的最后一个动作了,指导说串口把所有的动作组数据一下子都给了机器人,机器人反应不过来,试问怎么解决这个问题啊,让动作组一个一个发送给机器人,下面是我的代码
这是主函数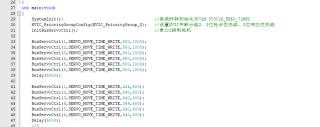
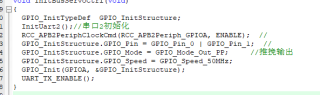
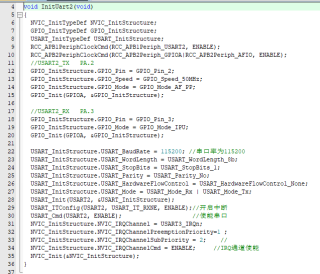
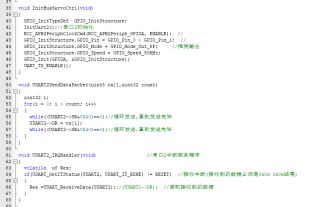
下面是串口函数

我基于STM32F10C8T6编了一个代码,即用串口发送数据给舵机,让舵机发生转动,但是我编了一套动作组,发现机器人直接就运行了一套动作组里的最后一个动作了,指导说串口把所有的动作组数据一下子都给了机器人,机器人反应不过来,试问怎么解决这个问题啊,让动作组一个一个发送给机器人,下面是我的代码
这是主函数
下面是串口函数
 分享
分享
你不是知道了要加延时吗?还有什么疑问
猜测BusServoCtrl()是发一包的,你每个这个函数后面加延时看看,要加秒级的,us/ms相对机械运动来说有点短
分享 修改了问题
7月15日
创建了问题
7月15日
修改了问题
7月15日
创建了问题
7月15日




