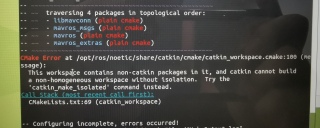
为什么会这样呢?

树莓派Ubuntumate20.04安装mav功能包的问题讨论

- 写回答
- 好问题 0 提建议
- 追加酬金
- 关注问题
 分享
分享- 邀请回答
-


1条回答 默认 最新
- 2022-07-04 22:04回答 2 已采纳 这个deb文件跟win10/11 里面的exe文件一样,点击选择deb文件,右键选择属性,选择第二个权限,所以用户的权限都是创建和删除文件,在选择下面的执行 勾选 允许作为程序执行文件;双击就可以安
- 2022-03-10 12:12回答 1 已采纳 切换成阿里云或华为云镜像再试试
- 2022-03-12 21:16回答 1 已采纳 windows最稳,其他的可能有奇怪诡异的bug
- 2021-10-21 18:02诗筱涵的博客 我现在发现ros noetic上已经有mavros的二进制功能包了 所以可以用命令 sudo apt-get install ros-noetic-mavros ros-noetic-mavros-extras 然后运行 git clone 马熙/mavros 然后在克隆下来的mavros文件夹里面...
- 2023-03-07 10:14回答 2 已采纳 这个配置sudo gedit /etc/default/grub里面的内容:GRUB_DEFAULT改为0 GRUB_DEFAULT=0 # sudo update-gru ```b 再更新一
- 2022-03-26 12:56回答 1 已采纳 中文好像设置一下就行了,在语言中设置啊
- 2023-04-12 19:38回答 1 已采纳 我是ubuntu20.04+cv4.1以及4.4,没遇到这个问题,https://blog.csdn.net/wd1603926823/article/details/108245043你这个报错是依
- ZARD帧心的博客 在新安装的Ubuntu 20.04系统中配置ORB-SLAM2和ORB-SLAM3的运行环境 Ubuntu系统自带的源都是国外的网址,国内用户在使用的时候下载比较慢甚至无法获取,在安装各种库或软件时会深受其折磨!解决方案是直接替换成国内...
- 2021-07-08 03:49回答 2 已采纳 已经解决,在BIOS里面禁用显卡直连即可
- 2022-11-05 09:45回答 4 已采纳 看起来你这 /dev/sda5 是系统盘 执行:fsck -y /dev/sda5 修复磁盘 磁盘修复完成,exit 退出会自动重启
- 2022-01-07 09:36回答 1 已采纳 尝试重新启动 linux 子系统的管理器,方法是以管理员身份打开命令提示符 () 并运行:cmd sc stop LxssManager sc start LxssManager 然后查询它以确保状
- 2021-06-18 19:381900_的博客 目录 写在前面: 环境说明: 准备工作(安装依赖): 源码下载: Pangolin安装: OpenCV安装 Eigen3安装 DBoW2 and g2o Python 安装boost库 安装libssl-dev ORB_SLAM3的编译和安装 源码编译: 数据集测试 运行截图:...
- 2021-02-27 12:34回答 1 已采纳 sudo apt-get update sudo apt-get -f install lsb-core
- 2024-02-21 21:58RichardLeeBIT的博客 用板子配置完orbslam3之后,发现orbslam3运行数据集效果是相当稳定的,但是跑实物似乎还是会存在bug(大概十帧左右就会重新绘制轨迹,丢失原来的里程),目前暂时不知道是主板的问题还是系统环境的问题。市面上部分...
- 2023-11-08 17:29RichardLeeBIT的博客 还需要检查一下是否有g2o库,没有的话需要自行安装编译一下。我的电脑上有高博的视觉slam14讲,里面自带了g2o的库,之前编译过,因此不受影响。得到g2o的源码后,进入文件夹下。
- 没有解决我的问题, 去提问


问题事件
 系统已结题
8月8日
系统已结题
8月8日 创建了问题
7月31日
创建了问题
7月31日
悬赏问题
- ¥15 对于相关问题的求解与代码
- ¥15 ubuntu子系统密码忘记
- ¥15 信号傅里叶变换在matlab上遇到的小问题请求帮助
- ¥15 保护模式-系统加载-段寄存器
- ¥15 电脑桌面设定一个区域禁止鼠标操作
- ¥15 求NPF226060磁芯的详细资料
- ¥15 使用R语言marginaleffects包进行边际效应图绘制
- ¥20 usb设备兼容性问题
- ¥15 错误(10048): “调用exui内部功能”库命令的参数“参数4”不能接受空数据。怎么解决啊
- ¥15 安装svn网络有问题怎么办