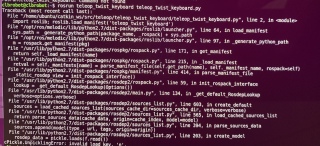
通过ssh 连接到机器人后输入$ rosrun teleop_twist_keyboard teleop_twist_keyboard.py
报错:cpickle.unpicklingerror:invalid load key.‘n'

通过ssh 连接到机器人后输入$ rosrun teleop_twist_keyboard teleop_twist_keyboard.py
报错:cpickle.unpicklingerror:invalid load key.‘n'
 分享
分享 请提交代码
5月5日
请提交代码
5月5日 系统已结题
9月15日
修改了问题
9月7日
创建了问题
9月7日
系统已结题
9月15日
修改了问题
9月7日
创建了问题
9月7日


