在通过ssh连接ros机器人后,输入rosrun teleop_twist_keyboard teleop_twist_keyboard.py运行失败,出现如下:
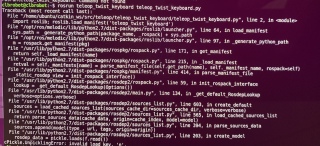
报错cpickle.unpicklingerror:invalid load key.‘n'

在通过ssh连接ros机器人后,输入rosrun teleop_twist_keyboard teleop_twist_keyboard.py运行失败,出现如下:
 分享
分享
你好,我是有问必答小助手,非常抱歉,本次您提出的有问必答问题,技术专家团超时未为您做出解答
本次提问扣除的有问必答次数,已经为您补发到账户,我们后续会持续优化,扩大我们的服务范围,为您带来更好地服务。
分享 系统已结题
9月15日
系统已结题
9月15日 创建了问题
9月7日
创建了问题
9月7日




