gazebo自己运行没问题,rviz自己运行也没问题。gazebo和rviz联合仿真时候,给rviz添加控件 点云 。坐标系都设置好了,rviz不显示,添加image控件,基本设置值都设置好了,就是不显示图像。
过了一会,gazebo出现闪退,进程卡死。代码如下:
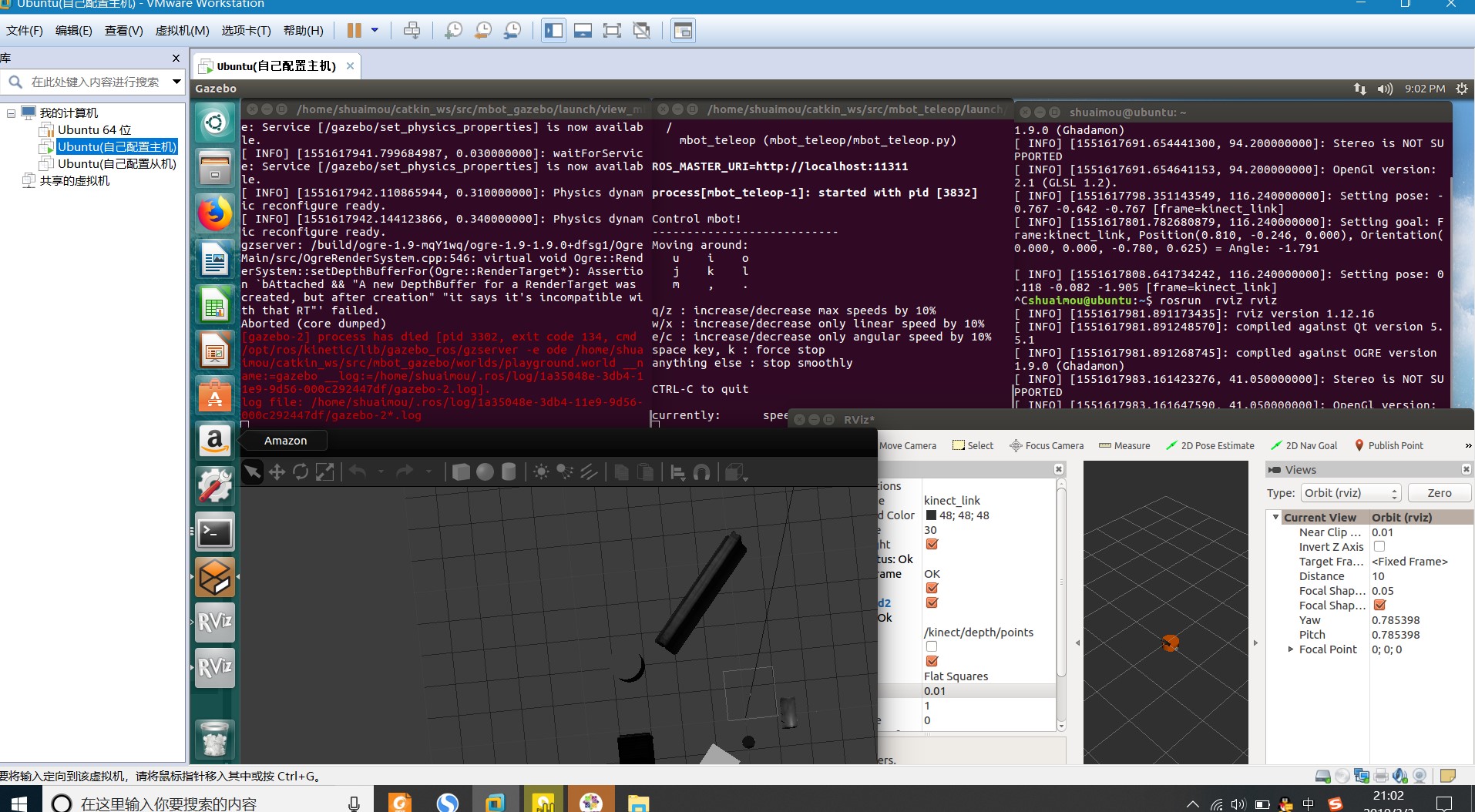
[gazebo-2] process has died [pid 2122, exit code 134, cmd /opt/ros/kinetic/lib/gazebo_ros/gzserver -e ode /home/shuaimou/catkin_ws/src/mbot_gazebo/worlds/playground.world __name:=gazebo __log:=/home/shuaimou/.ros/log/3fc2a05e-3db3-11e9-9d56-000c292447df/gazebo-2.log].
log file: /home/shuaimou/.ros/log/3fc2a05e-3db3-11e9-9d56-000c292447df/gazebo-2*.log
Killed
[gazebo_gui-3] process has died [pid 2124, exit code 137, cmd /opt/ros/kinetic/lib/gazebo_ros/gzclient __name:=gazebo_gui __log:=/home/shuaimou/.ros/log/3fc2a05e-3db3-11e9-9d56-000c292447df/gazebo_gui-3.log].
log file: /home/shuaimou/.ros/log/3fc2a05e-3db3-11e9-9d56-000c292447df/gazebo_gui-3*.log