


1条回答 默认 最新
 技术专家团-Joel 2021-11-20 10:29关注
技术专家团-Joel 2021-11-20 10:29关注你好同学,这个可以用多项式插值做
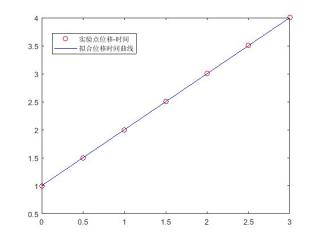
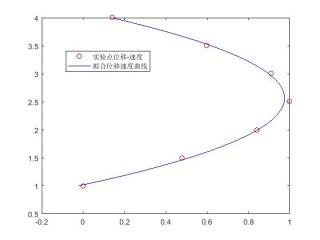
t = [0,0.5,1.0,1.5,2.0,2.5,3.0]; v = [0,0.4794,0.8415,0.9975,0.9093,0.5985,0.1411]; s = [1,1.5,2,2.5,3,3.5,4]; pv = polyfit(t,v,2); % 多项式拟合速度 ps = polyfit(t,s,3); % 多项式拟合位移 tp = 0:0.01:3.0; vp = polyval(pv, tp);%得到拟合后的速度 sp = polyval(ps, tp);%得到拟合后的位移 figure(1);clf plot(t, v, 'ro', tp, vp, 'b-') legend('实验点速度-时间','拟合速度时间曲线') figure(2);clf plot(t,s,'ro', tp, sp, 'b-') legend('实验点位移-时间','拟合位移时间曲线') figure(3);clf plot(v,s,'ro', vp, sp, 'b-') legend('实验点位移-速度','拟合位移速度曲线')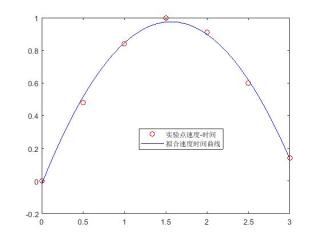
 本回答被题主选为最佳回答 , 对您是否有帮助呢?评论 打赏解决 1无用举报
本回答被题主选为最佳回答 , 对您是否有帮助呢?评论 打赏解决 1无用举报 分享
分享
- 2021-06-28 12:20在深入讨论Matlab多项式与插值运算编程之前,我们需要对Matlab语言进行一些基础了解。Matlab是一种用于数值计算、可视化以及编程的高级语言和交互式环境。它广泛应用于工程计算、控制设计、信号处理和通信领域。...
- 2021-10-16 01:54在Matlab中,多项式与插值运算编程是数值计算中的重要组成部分,广泛应用于数据分析、信号处理、工程...通过阅读"Matlab多项式与插值运算编程.pdf"这份文档,你将深入学习到这些概念,并掌握如何在Matlab中实现它们。
- 2021-12-12 11:52这个"Matlab多项式运算_matlab源码.rar"压缩包可能包含了关于如何在MATLAB中进行多项式运算的演示和源代码。 首先,MATLAB中的多项式可以用向量表示。例如,一个二次多项式 \( ax^2 + bx + c \) 可以表示为 `[a, b,...
- 2021-04-21 22:29乔一帆丶的博客 一、多项式的表示方法1.系数向量直接输入法例1:>> p = [1 -5 6 -33];>> poly2sym(p)ans =x^3 - 5*x^2 + 6*x – 332.特征多项式输入法例2:>> a = [1 2 3;2 3 4;3 4 5];>> p1 = poly(a)p1 =...
- 2025-04-19 14:02作为一款强大的技术计算软件,MATLAB 集数值分析、矩阵运算、信号处理等多功能于一身,广泛应用于工程、科学研究等众多领域。 其简洁直观的编程环境,让代码编写如同行云流水。丰富的函数库和工具箱,为你节省大量...
- 2022-09-26 15:15秋刀鱼程序编程的博客 多项式在数学中有着极为重要的作用,而多项式的运算在工程和应用中经常遇到的问题。因此,Matlab提供了专门的处理多项式的方法和函数。
- 2018-08-23 12:12在MATLAB中,多项式加法是通过内置的函数实现的,这使得处理多项式运算变得非常方便。本文将深入探讨如何使用MATLAB进行多项式加法,以及相关的函数和概念。 首先,MATLAB中的多项式通常表示为向量形式,其中向量的...
- 2012-02-12 15:25综上所述,这个压缩包提供了一个学习和实践Matlab中多项式根运算的好机会,不仅可以深入理解数值方法,还可以提高Matlab编程能力。通过研究源码,可以了解到背后的算法逻辑,这对于学术研究或工程实践都有极大的价值...
- 2023-09-25 20:36理解并熟练运用这些MATLAB多项式处理功能,能够帮助你在解决实际问题时更加高效。无论是数据拟合、插值还是微分方程求解,MATLAB的多项式工具都能提供强大的支持。在实践中不断探索和练习,你将逐渐精通MATLAB的...
- 2023-09-13 09:394. **多项式运算**: - **加法与减法**:两个多项式`p`和`q`相加或相减,可以直接通过向量加减实现,如`pq = p + q`或`pq = p - q`。 - **乘法**:使用`conv`函数进行多项式乘法,如`pq = conv(p, q)`。 - **除法...
- 没有解决我的问题, 去提问


问题事件
 系统已结题
11月28日
系统已结题
11月28日 已采纳回答
11月20日
已采纳回答
11月20日-
创建了问题
11月20日