问题遇到的现象和发生背景
STM32F4xx 使用DMA_ >>"TIM2和TIM5"<< _PWM无法点亮灯带ws2812问题??
在使用STM32F4x上时 发现
1)定时器2 无法点亮灯带,使用STM32cudeIDE自动生成配置代码,TIM3 可以点亮,可以说配置完全一致。
2)定时器2 和定时器3 在STM32F1上经测试,可以点亮,没有区别
3)可以说F4(TIM2 32位)和F1 (TIM2 16位)定时器是唯一区别,TIM3都是16位的F1F4,会不会是这个到这个原因导致的
问题相关代码,请勿粘贴截图
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* <h2><center>© Copyright (c) 2021 STMicroelectronics.
* All rights reserved.</center></h2>
*
* This software component is licensed by ST under BSD 3-Clause license,
* the "License"; You may not use this file except in compliance with the
* License. You may obtain a copy of the License at:
* opensource.org/licenses/BSD-3-Clause
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "stdio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
extern TIM_HandleTypeDef htim2;
extern DMA_HandleTypeDef hdma_tim2_ch1_trig;
extern TIM_HandleTypeDef htim3;
extern DMA_HandleTypeDef hdma_tim3_ch1_trig;
/* USER CODE BEGIN PV */
/* USER CODE BEGIN PV */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
int fputc(int ch,FILE *f)
{
ITM_SendChar(ch);
return (ch);
}
#define ONE_PULSE (59) //1 Âë¼ÆÊý¸öÊý
#define ZERO_PULSE (29) //0 Âë¼ÆÊý¸öÊý
#define RESET_PULSE (48) //80 ¸´Î»µçƽ¸öÊý£¨²»ÄܵÍÓÚ40£©
#define LED_NUMS (4) //led ¸öÊý
#define LED_DATA_LEN (24) //led ³¤¶È£¬µ¥¸öÐèÒª24¸ö×Ö½Ú
#define WS2812_DATA_LEN (LED_NUMS*LED_DATA_LEN) //ws2812µÆÌõÐèÒªµÄÊý×鳤¶È
uint16_t static RGB_buffur[RESET_PULSE + WS2812_DATA_LEN] = { 0 };
void ws2812_set_RGB(uint8_t R, uint8_t G, uint8_t B, uint16_t num)
{
//Ö¸ÕëÆ«ÒÆ:ÐèÒªÌø¹ý¸´Î»ÐźŵÄN¸ö0
uint16_t* p = (RGB_buffur + RESET_PULSE) + (num * LED_DATA_LEN);
for (uint16_t i = 0;i < 8;i++)
{
//Ìî³äÊý×é
p[i] = (G << i) & (0x80)?ONE_PULSE:ZERO_PULSE;
p[i + 8] = (R << i) & (0x80)?ONE_PULSE:ZERO_PULSE;
p[i + 16] = (B << i) & (0x80)?ONE_PULSE:ZERO_PULSE;
}
}
void HAL_TIM_PWM_PulseFinishedCallback(TIM_HandleTypeDef *htim)
{
__HAL_TIM_SetCompare(htim, TIM_CHANNEL_1,0); //占空比清0,若不清会导致灯珠颜色不对
HAL_TIM_PWM_Stop_DMA(htim,TIM_CHANNEL_1);
}
void ws2812_example(void)
{
//#1.Ìî³äÊý×é
ws2812_set_RGB(0x22, 0x00, 0x00, 0);
ws2812_set_RGB(0x00, 0x22, 0x00, 1);
ws2812_set_RGB(0x00, 0x00, 0x22, 2);
ws2812_set_RGB(0x22, 0x22, 0x22, 3);
//#2.´«ÊäÊý¾Ý
HAL_TIM_PWM_Start_DMA(&htim2,TIM_CHANNEL_1,(uint32_t *)RGB_buffur,176);
HAL_TIM_PWM_Start_DMA(&htim3,TIM_CHANNEL_1,(uint32_t *)RGB_buffur,176);
//#3.ÑÓʱ£ºÊ¹Ð§¹û¿ÉÒÔ±»¹Û²ì
HAL_Delay(500);
ws2812_set_RGB(0x22, 0x00, 0x00, 1);
ws2812_set_RGB(0x00, 0x22, 0x00, 2);
ws2812_set_RGB(0x00, 0x00, 0x22, 3);
ws2812_set_RGB(0x22, 0x22, 0x22, 0);
HAL_TIM_PWM_Start_DMA(&htim2,TIM_CHANNEL_1,(uint32_t *)RGB_buffur,176);
HAL_TIM_PWM_Start_DMA(&htim3,TIM_CHANNEL_1,(uint32_t *)RGB_buffur,176);
HAL_Delay(500);
}
/* USER CODE END 0 */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
tim3_init();
tim2_Init();
//HAL_TIM_PWM_MspInit();
/* Initialize all configured peripherals */
MX_GPIO_Init();
// MX_DMA_Init();
//MX_TIM2_Init();
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
ws2812_example();
// ws281x_show();
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = 4;
RCC_OscInitStruct.PLL.PLLN = 168;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 4;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV2;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/**
* Enable DMA controller clock
*/
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOH_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
配置相关代码
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file stm32f4xx_hal_msp.c
* @brief This file provides code for the MSP Initialization
* and de-Initialization codes.
******************************************************************************
* @attention
*
* <h2><center>© Copyright (c) 2021 STMicroelectronics.
* All rights reserved.</center></h2>
*
* This software component is licensed by ST under BSD 3-Clause license,
* the "License"; You may not use this file except in compliance with the
* License. You may obtain a copy of the License at:
* opensource.org/licenses/BSD-3-Clause
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* USER CODE BEGIN Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN TD */
/* USER CODE END TD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN Define */
/* USER CODE END Define */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN Macro */
/* USER CODE END Macro */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* External functions --------------------------------------------------------*/
/* USER CODE BEGIN ExternalFunctions */
/* USER CODE END ExternalFunctions */
#include <string.h>
#ifndef PIXEL_NUM
#define PIXEL_NUM 5
#endif
#define GRB (3*8)
/* pwm 占空比数值为uint16_t 类型,DMA传输时只能以半字输出,pixelBuffer应为uint16_t 类型 */
TIM_HandleTypeDef htim2;
DMA_HandleTypeDef hdma_tim2_ch1_trig;
TIM_HandleTypeDef htim3;
DMA_HandleTypeDef hdma_tim3_ch1_trig;
void ws281x_init(void)
{
/* 配置TIM3 pwm频率为800Khz */
tim3_init();
}
/* 中断回调函数,在设定的pwm通过DMA发送完成后会调用 */
/* USER CODE BEGIN 0 */
/**
* @brief TIM2 Initialization Function
* @param None
* @retval None
*/
void tim2_Init(void)
{
/* USER CODE BEGIN TIM2_Init 0 */
/* USER CODE END TIM2_Init 0 */
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_OC_InitTypeDef sConfigOC = {0};
/* USER CODE BEGIN TIM2_Init 1 */
/* USER CODE END TIM2_Init 1 */
htim2.Instance = TIM2;
htim2.Init.Prescaler = 0;
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = (uint16_t)105-1;
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
//htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_PWM_Init(&htim2) != HAL_OK)
{
// Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig) != HAL_OK)
{
// Error_Handler();
}
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 0;
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
if (HAL_TIM_PWM_ConfigChannel(&htim2, &sConfigOC, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM2_Init 2 */
/* USER CODE END TIM2_Init 2 */
HAL_TIM_MspPostInit(&htim2);
// HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_1);
}
void tim3_init(void)
{
TIM_MasterConfigTypeDef sMasterConfig;
TIM_OC_InitTypeDef sConfigOC;
htim3.Instance = TIM3;
htim3.Init.Prescaler = 0;
htim3.Init.CounterMode = TIM_COUNTERMODE_UP;
htim3.Init.Period = 105-1;
htim3.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
if (HAL_TIM_PWM_Init(&htim3) != HAL_OK)
{
// _Error_Handler(__FILE__, __LINE__);
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim3, &sMasterConfig) != HAL_OK)
{
// _Error_Handler(__FILE__, __LINE__);
}
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 0;
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
if (HAL_TIM_PWM_ConfigChannel(&htim3, &sConfigOC, TIM_CHANNEL_1) != HAL_OK)
{
// _Error_Handler(__FILE__, __LINE__);
}
HAL_TIM_MspPostInit(&htim3);
}
/**
* @brief This function handles DMA1 stream4 global interrupt.
*/
void DMA1_Stream4_IRQHandler(void)
{
HAL_DMA_IRQHandler(&hdma_tim3_ch1_trig);
}
void DMA1_Stream5_IRQHandler(void)
{
HAL_DMA_IRQHandler(&hdma_tim2_ch1_trig);
}
/**
* @brief This function handles TIM3 global interrupt.
*/
void TIM3_IRQHandler(void)
{
HAL_TIM_IRQHandler(&htim3);
}
void TIM2_IRQHandler(void)
{
HAL_TIM_IRQHandler(&htim2);
}
/* USER CODE END 0 */
/**
* Initializes the Global MSP.
*/
void HAL_MspInit(void)
{
/* USER CODE BEGIN MspInit 0 */
/* USER CODE END MspInit 0 */
__HAL_RCC_SYSCFG_CLK_ENABLE();
__HAL_RCC_PWR_CLK_ENABLE();
/* System interrupt init*/
/* USER CODE BEGIN MspInit 1 */
/* USER CODE END MspInit 1 */
}
/**
* @brief TIM_PWM MSP Initialization
* This function configures the hardware resources used in this example
* @param htim_pwm: TIM_PWM handle pointer
* @retval None
*/
void HAL_TIM_PWM_MspInit(TIM_HandleTypeDef* htim_pwm)
{
if(htim_pwm->Instance==TIM2)
{
/* USER CODE BEGIN TIM2_MspInit 0 */
/* USER CODE END TIM2_MspInit 0 */
/* Peripheral clock enable */
__HAL_RCC_TIM2_CLK_ENABLE();
__HAL_RCC_DMA1_CLK_ENABLE();
/* TIM2 DMA Init */
/* TIM2_CH1 Init */
hdma_tim2_ch1_trig.Instance = DMA1_Stream5;
hdma_tim2_ch1_trig.Init.Channel = DMA_CHANNEL_3;
hdma_tim2_ch1_trig.Init.Direction = DMA_MEMORY_TO_PERIPH;
hdma_tim2_ch1_trig.Init.PeriphInc = DMA_PINC_DISABLE;
hdma_tim2_ch1_trig.Init.MemInc = DMA_MINC_ENABLE;
hdma_tim2_ch1_trig.Init.PeriphDataAlignment = DMA_PDATAALIGN_HALFWORD;
hdma_tim2_ch1_trig.Init.MemDataAlignment = DMA_MDATAALIGN_HALFWORD;
hdma_tim2_ch1_trig.Init.Mode = DMA_CIRCULAR;
hdma_tim2_ch1_trig.Init.Priority = DMA_PRIORITY_MEDIUM;
hdma_tim2_ch1_trig.Init.FIFOMode = DMA_FIFOMODE_DISABLE;
if (HAL_DMA_Init(&hdma_tim2_ch1_trig) != HAL_OK)
{
Error_Handler();
}
// TIM_DMACmd
__HAL_LINKDMA(htim_pwm,hdma[TIM_DMA_ID_UPDATE],hdma_tim2_ch1_trig);
// __HAL_LINKDMA(htim_pwm,hdma[TIM_DMA_ID_CC1],hdma_tim2_ch1_trig);
/* TIM3 interrupt Init */
HAL_NVIC_SetPriority(TIM2_IRQn, 1, 1);
HAL_NVIC_EnableIRQ(TIM2_IRQn);
/* DMA interrupt init */
/* DMA1_Stream4_IRQn interrupt configuration */
HAL_NVIC_SetPriority(DMA1_Stream5_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(DMA1_Stream5_IRQn);
/* USER CODE BEGIN TIM2_MspInit 1 */
/* USER CODE END TIM2_MspInit 1 */
}
if(htim_pwm->Instance==TIM3)
{
/* TIM3 clock enable */
__HAL_RCC_TIM3_CLK_ENABLE();
/* DMA controller clock enable */
__HAL_RCC_DMA1_CLK_ENABLE();
/* TIM3 DMA Init */
/* TIM3_CH1_TRIG Init */
hdma_tim3_ch1_trig.Instance = DMA1_Stream4;
hdma_tim3_ch1_trig.Init.Channel = DMA_CHANNEL_5;
hdma_tim3_ch1_trig.Init.Direction = DMA_MEMORY_TO_PERIPH;
hdma_tim3_ch1_trig.Init.PeriphInc = DMA_PINC_DISABLE;
hdma_tim3_ch1_trig.Init.MemInc = DMA_MINC_ENABLE;
hdma_tim3_ch1_trig.Init.PeriphDataAlignment = DMA_PDATAALIGN_HALFWORD;
hdma_tim3_ch1_trig.Init.MemDataAlignment = DMA_MDATAALIGN_HALFWORD;
hdma_tim3_ch1_trig.Init.Mode = DMA_NORMAL;
hdma_tim3_ch1_trig.Init.Priority = DMA_PRIORITY_MEDIUM;
hdma_tim3_ch1_trig.Init.FIFOMode = DMA_FIFOMODE_DISABLE;
if (HAL_DMA_Init(&hdma_tim3_ch1_trig) != HAL_OK)
{
// _Error_Handler(__FILE__, __LINE__);
}
/* Several peripheral DMA handle pointers point to the same DMA handle.
Be aware that there is only one stream to perform all the requested DMAs. */
__HAL_LINKDMA(htim_pwm,hdma[TIM_DMA_ID_CC1],hdma_tim3_ch1_trig);
__HAL_LINKDMA(htim_pwm,hdma[TIM_DMA_ID_TRIGGER],hdma_tim3_ch1_trig);
/* TIM3 interrupt Init */
HAL_NVIC_SetPriority(TIM3_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(TIM3_IRQn);
/* DMA interrupt init */
/* DMA1_Stream4_IRQn interrupt configuration */
HAL_NVIC_SetPriority(DMA1_Stream4_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(DMA1_Stream4_IRQn);
}
}
void HAL_TIM_MspPostInit(TIM_HandleTypeDef* htim)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(htim->Instance==TIM2)
{
/* USER CODE BEGIN TIM2_MspPostInit 0 */
/* USER CODE END TIM2_MspPostInit 0 */
__HAL_RCC_GPIOA_CLK_ENABLE();
/**TIM2 GPIO Configuration
PA0-WKUP ------> TIM2_CH1
*/
GPIO_InitStruct.Pin = GPIO_PIN_0;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
GPIO_InitStruct.Alternate = GPIO_AF1_TIM2;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* USER CODE BEGIN TIM2_MspPostInit 1 */
/* USER CODE END TIM2_MspPostInit 1 */
}
if(htim->Instance==TIM3)
{
/* GPIOA clock enable */
__HAL_RCC_GPIOA_CLK_ENABLE();
/**TIM3 GPIO Configuration
PA6 ------> TIM3_CH1
*/
GPIO_InitStruct.Pin = GPIO_PIN_6;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
GPIO_InitStruct.Alternate = GPIO_AF2_TIM3;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
}
}
/**
* @brief TIM_PWM MSP De-Initialization
* This function freeze the hardware resources used in this example
* @param htim_pwm: TIM_PWM handle pointer
* @retval None
*/
void HAL_TIM_PWM_MspDeInit(TIM_HandleTypeDef* htim_pwm)
{
if(htim_pwm->Instance==TIM2)
{
/* USER CODE BEGIN TIM2_MspDeInit 0 */
/* USER CODE END TIM2_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_TIM2_CLK_DISABLE();
/* TIM2 DMA DeInit */
HAL_DMA_DeInit(htim_pwm->hdma[TIM_DMA_ID_CC1]);
HAL_DMA_DeInit(htim_pwm->hdma[TIM_DMA_ID_TRIGGER]);
/* TIM3 interrupt Deinit */
HAL_NVIC_DisableIRQ(TIM2_IRQn);
/* USER CODE BEGIN TIM2_MspDeInit 1 */
/* USER CODE END TIM2_MspDeInit 1 */
}
if(htim_pwm->Instance==TIM3)
{
/* Peripheral clock disable */
__HAL_RCC_TIM3_CLK_DISABLE();
/* TIM3 DMA DeInit */
HAL_DMA_DeInit(htim_pwm->hdma[TIM_DMA_ID_CC1]);
HAL_DMA_DeInit(htim_pwm->hdma[TIM_DMA_ID_TRIGGER]);
/* TIM3 interrupt Deinit */
HAL_NVIC_DisableIRQ(TIM3_IRQn);
}
}
/* USER CODE END 1 */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
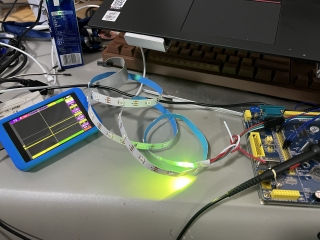
运行结果及报错内容
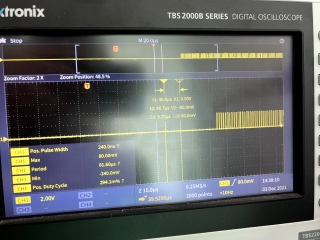
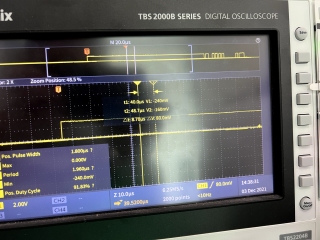
在F4上
定时器3没有问题如下图示波器,
定时器2 可以出输出波形但是数据不对
我的解答思路和尝试过的方法
在网上找过相关资料,多次尝试
1)大部分资料都巧妙的绕过了TIM2,在F4上
2)有人提过F4的TIM2是32位的 如何强制当成16位的吗,装载值尝试过不行
3)有说TIM2 设置连接模式 TIM_DMA_UPDATA的 尝试也不行
我想要达到的结果
在STM32cudeIDE下 STM32F405下 TIM2_ch1(PA0) 正常点亮灯带ws2812