具体内容查找论文《无刷直流电机在不同驱动方式下的性能比较研究》
这篇
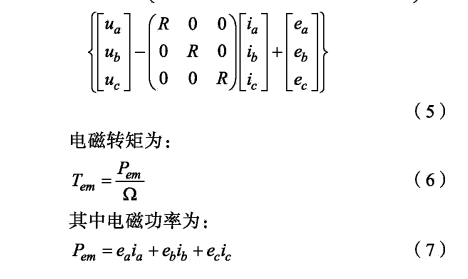
下面是该论文中的系统数学建模

而通过MATLAB仿真图,下面这两个图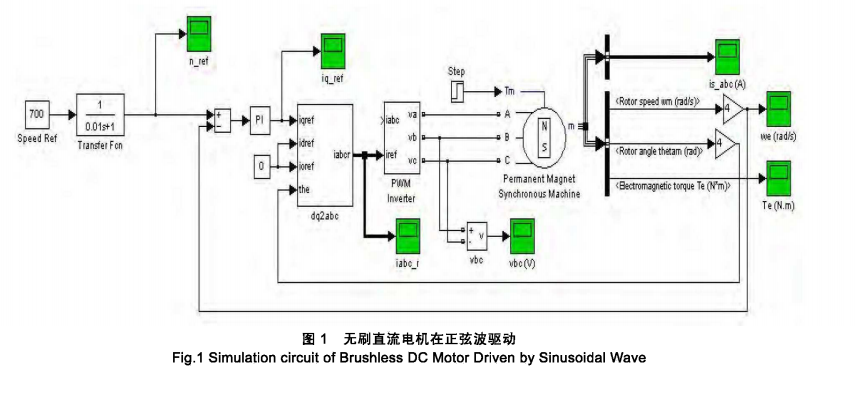
只需要正弦波的仿真
想要的就是MATLAB仿真程序,可以直接导入运行成功的,安装包形式回答!!!
大牛们给力呀。

具体内容查找论文《无刷直流电机在不同驱动方式下的性能比较研究》
这篇
下面是该论文中的系统数学建模
而通过MATLAB仿真图,下面这两个图
只需要正弦波的仿真
想要的就是MATLAB仿真程序,可以直接导入运行成功的,安装包形式回答!!!
大牛们给力呀。
 分享
分享 第四章 BLDCM仿真及结果分析
4.1正弦波驱动仿真
如图4-1,当使用正弦波驱动永磁无刷直流电机时,形成的电机的反电势波形是为正弦波。图4-2是正弦波永磁无刷直流电机通过MATLAB对正弦波驱动仿真结果。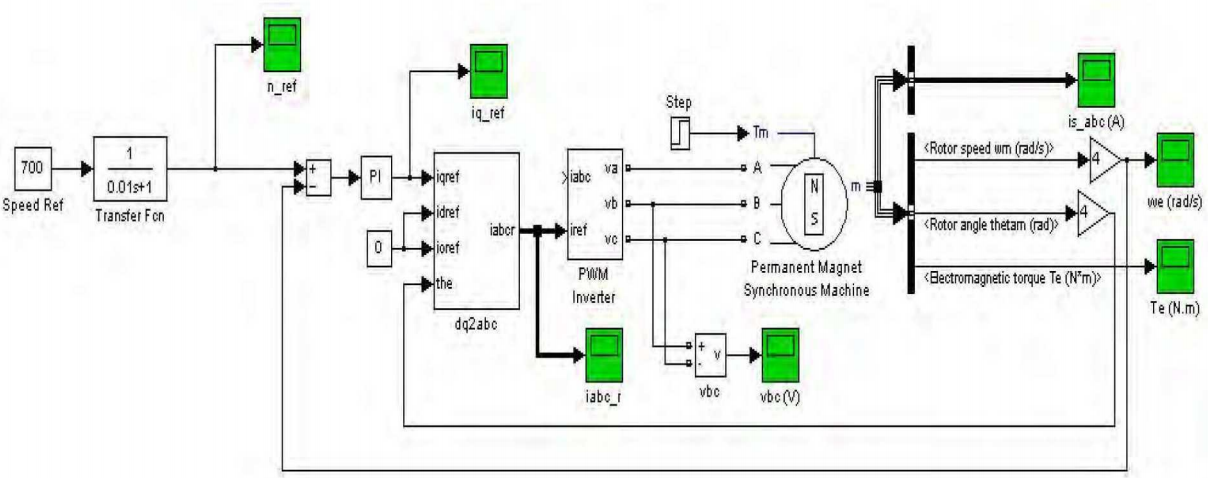
图4-1无刷直流电机在正弦波驱动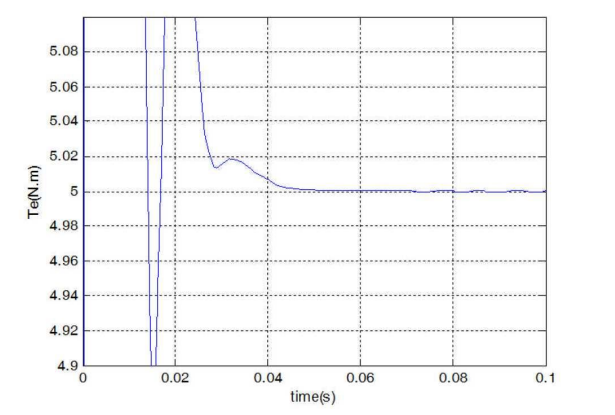
图4-2电磁转矩图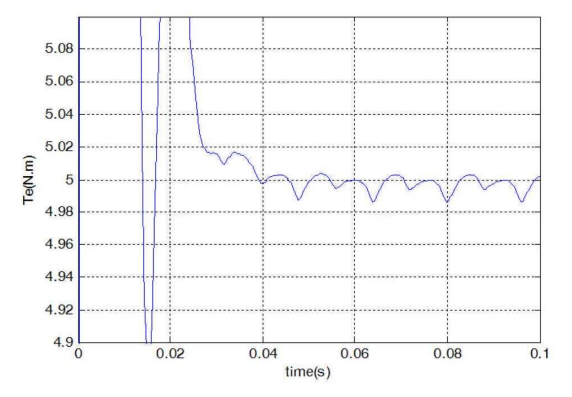
图4-3电磁转矩图
为了比较正弦波和梯形波之间的性能差异,将图4-1中的电机模块反电势的波形由原来的正弦波改变为反电势的梯形波,然后其他的条件都保持不变,只是在这波形改变的条件下。然后在用电机模块对梯形波永磁无刷直流电机正弦波驱动方式通过MATLAB对仿真结果,如图4-3所示。
通过图4-2与图4-3分析,得到了结论,当电机在正弦波的驱动方式下时,两者相比较发现正弦波的永磁无刷电机正弦波驱动的电磁转矩较为平缓,而梯形波的永磁无刷直流电机在正弦波驱动方式下的抖动范围较大一些,即梯形波抖动较大,正弦波抖动较为平缓。
4.2六脉冲驱动仿真
图4-4是验证当无刷直流永磁电机的驱动方式为六脉冲是的仿真电路,并且该方式下形成的电势波形为正弦波。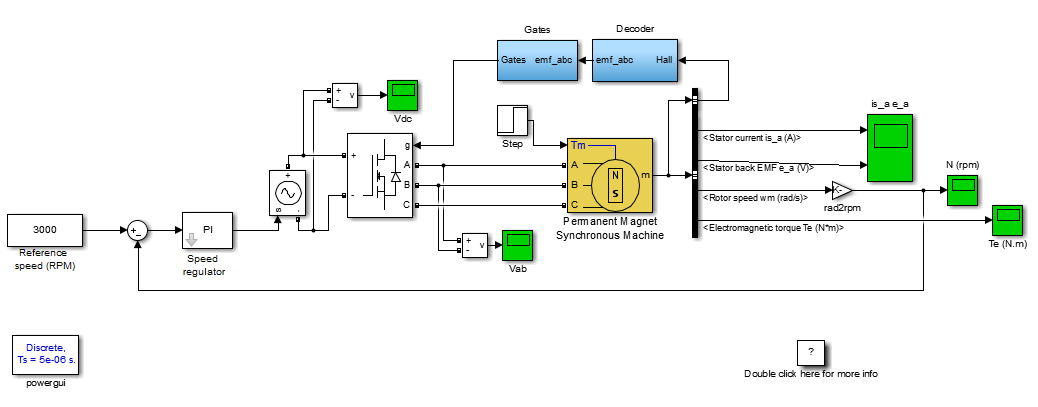
图4-4 六脉冲方波驱动时的仿真电路
图4-5是图4-4中的仿真结果,波形为正弦波的永磁无刷直流电机且驱动方式是六脉冲驱动方式的仿真结果。
将图4-4中的反电动势的波形变换成梯形波,然后保持电压、增益等都保持不变的情况下,得到的仿真结果如图4-6所示。
通过图4-5与图4-6分析可得,当永磁无刷直流电机在六脉冲方波的驱动方式下是,通过该电机的正弦波与梯形波的两种反电动势的波形在该驱动方式的仿真得出,这个结果与上述的在正弦波驱动的方式得到的结果类似,即波形为梯形波的时候,电磁转矩的波动(抖动)范围更大一些,而反电动势为正弦波的时候则平缓一些,通过上述两种驱动方式,同种驱动方式下,反电动势为梯形波比反电动势为正弦波的转矩脉冲小一点。
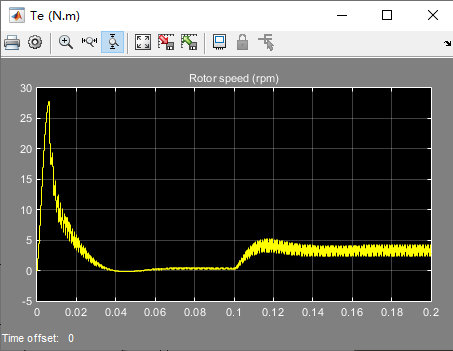
图4-5电磁转矩图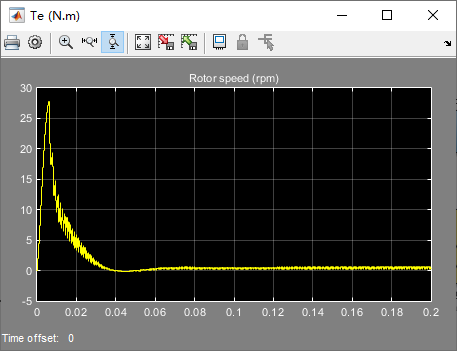
图4-6电磁转矩图
4.3换相转矩脉动对比和分析
分析式子,为反电动势常数,φ磁通值大小。通过式子可以知道,转矩与磁通值、电流和反电动势常数有关,而反电动势是一个常数,而在永磁无刷直流电机中的磁通值通常是不变化的,所以研究时主要针对的电流I,所以可以得到当电流发生变化是转矩也会发生大小波动,成正比。如果电流变化很大,那么由于关系映射转矩也会变得变化很大。但是无刷直流电机中的电枢绕组的原由,可以理解为反电动势的作用,不会让转矩变化有很大的浮动。这就有了研究的意义,上述验证了两种驱动方式正弦波驱动方式和六脉冲驱动方式,正弦波产生的波形较为平滑,并没有像六脉冲驱动方式下的转矩波动。再分析当相同的驱动方式下时,并且上述的仿真也验证了同种驱动方式,正弦波的抖动比梯形波的小,即BLACM运行产生的脉冲小于BLDCM产生的脉冲,原因分析其实很简单,在分析式子,由于梯形波的电流波动大,所用通过式子分析转矩也是波动大的。
一般的情况下,当启动永磁无刷电机是,电机会从0运行到一定的高速状态。而在这段过程初中,电机绕组在磁场中运转会产生电感,并且在电感的作用下阻碍电流变化,相应的电枢电流变化就变得迟缓平滑一些,转矩也会相应的下降一些。因此为了这种不好的方式,我们可以通过相应的措施来进行控制和补救。
首先,我们知道电机在旋转过程中,需要不断的换相,因此便可以对换相进行操作,使其相电流的大小值恒定,因此这样就能够对电流进行补偿及电流进行控制,这样的作用是非常明显的。但是一般的我们会使用人为操作的方式针对换向过程的时间进行加长,这样也能达到电流控制变得更加的精确。目前在一般的实际运用中通常使用的方式是重叠换向法,该重叠换向法的原理是通过超前和延后的换相方式的结合,这两种方式的结合可以达到对无刷电机转矩进行控制的效果。具体实现,当转子传感器收到信号后,不关断,而是保持该状态维持一段时间再关断,而超前换向顾名思义是电机换向信号快到时,开通一定的角度,来达到对换向过程的补偿作用,这样就会发生电流下降,因此达到转矩的脉冲值变小。除此之外,对于梯形波反电势无刷直流电动机工作方式,通过延后换向关断的方式来进行达到效果,然后在通过脉冲调制的调节方式进行调节,这样就能很好的控制方式。
分享

