
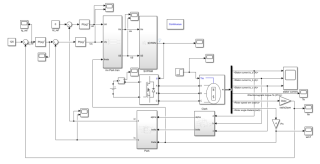
在simulink里搭建了永磁同步电机FOC仿真模型
PI参数分别为:转速环P=0.273 I=567.7
q轴电流P=100 I=0.2
d轴电流P=600 I=0.65
电机参数为
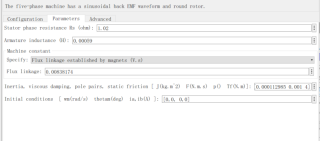
转速输入常数120,负载转矩为0.05秒时输入的阶跃信号,幅值为0.1
得到的结果
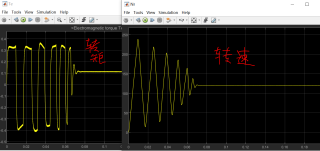
启动阶段剧烈振荡,请问下大家会是什么原因?

在simulink里搭建了永磁同步电机FOC仿真模型
PI参数分别为:转速环P=0.273 I=567.7
q轴电流P=100 I=0.2
d轴电流P=600 I=0.65
电机参数为
 分享
分享
没有具体计算哈,主要是一个过程的建议,
1、检验电流环性能。断开转速环,只保留dq轴电流环,并将电机模块输出的Te直接连接到Tm,构造一个堵转的工况。然后给定一个id和iq,观察给定与反馈是否可以跟随。如果反馈的跟随性能较好,快速性也较好,则电流环没有问题。如果电流环无法跟随,重新计算电流环PI参数,并重新调试,在保证电流环性能完好后再调试转速环。
2、检查转速环性能。闭合转速环,首先注意检查几个点,第一个是反馈的单位和给定单位是否一致,电机模块输出的是机械转速并且单位是rad/s,乘以9.55后为rpm;第二个空载调试,先排除负载造成的启动问题;第三个检查给定转速是否超过电机额定转速,双闭环FOC是无法实现超过额定转速的跟随的,第四个检查限幅值是否设置合理,可初步设置电机额定电流为限幅值。在确认上面没问题了,建议给一个二分之一额定转速的指令转速,然后观察跟随效果。如果是跟随了,当然就是没问题的,如果出现给定与反馈存在静差,则PI参数还需要优化,具体的怎么调PI可以百度,好多的。但是如果出现震荡的问题,证明PI基本错误就不在一个量级了,调试的效果有限,建议重新检查是否是PI参数计算错误。
3、另外建议是在这个离散环境下进行仿真,更符合实际工况。
分享 系统已结题
3月13日
系统已结题
3月13日 已采纳回答
3月5日
创建了问题
12月16日
已采纳回答
3月5日
创建了问题
12月16日

