

软件STM32cubeIDE上
(1)STM32的 DMA 数据流是否可以映射到多个外设,是否可以同时使用如何在数据流中进行判断
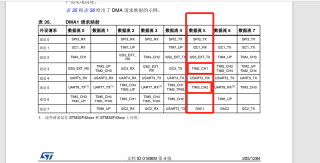
(2)如下图是DMA1映射,它们同时在数据流5上
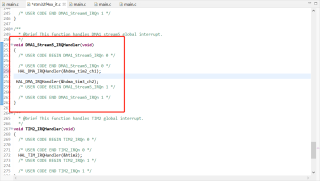
(3)本人调试的时候,发现使用tim2_ch1(PA0)和tim3_ch2(PA7)时,因为流中断函数中有如下写法,才导致无法使用,屏蔽一方,另一个通道就可以输出。
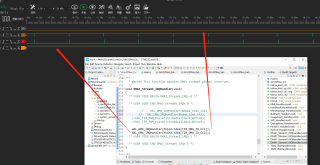
(4)如下图时同时使用函数情况,另外开了tim2_ch3(PA2引脚)和tim3_ch1(PA6引脚), 图中逻辑分析仪>>1通道2通道抓到有波形,其中0通道(tim2_ch1(PA0引脚))3通道(tim3_ch2(PA7)) 无数据
(5)追求目标,在DMA1_Stream5_IRQHandler函数如何编写判断
(6)以下是代码
main.c
```c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2021 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
TIM_HandleTypeDef htim2;
TIM_HandleTypeDef htim3;
DMA_HandleTypeDef hdma_tim2_ch1;
DMA_HandleTypeDef hdma_tim2_up_ch3;
DMA_HandleTypeDef hdma_tim2_ch1;
DMA_HandleTypeDef hdma_tim3_ch2;
DMA_HandleTypeDef hdma_tim3_ch1_trig;
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_DMA_Init(void);
static void MX_TIM2_Init(void);
static void MX_TIM3_Init(void);
/* USER CODE BEGIN PFP */
/* USER CODE BEGIN 0 */
uint32_t tim2_ccr1_value[] = {30, 20, 30, 40, 50, 60, 70, 80, 90};
uint16_t tim3_ccr1_value[] = {10, 20, 30, 40, 50, 60, 70, 80, 90};
void HAL_TIM_PWM_PulseFinishedCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance == TIM2)
{
if(htim->Channel == HAL_TIM_ACTIVE_CHANNEL_1)
{
HAL_DMA_IRQHandler(&hdma_tim2_ch1);
__HAL_TIM_SetCompare(htim, TIM_CHANNEL_1,0); //占空比清0,若不清会导致灯珠颜色不对
HAL_TIM_PWM_Stop_DMA(htim,TIM_CHANNEL_1);
}else
if(htim->Channel == HAL_TIM_ACTIVE_CHANNEL_3)
{
__HAL_TIM_SetCompare(htim, TIM_CHANNEL_3,0); //占空比清0,若不清会导致灯珠颜色不对
HAL_TIM_PWM_Stop_DMA(htim,TIM_CHANNEL_3);
}
}
if(htim->Instance == TIM3)
{
if(htim->Channel == HAL_TIM_ACTIVE_CHANNEL_1)
{
__HAL_TIM_SetCompare(htim, TIM_CHANNEL_1,0); //占空比清0,若不清会导致灯珠颜色不对
HAL_TIM_PWM_Stop_DMA(htim,TIM_CHANNEL_1);
}else
if(htim->Channel == HAL_TIM_ACTIVE_CHANNEL_2)
{
__HAL_TIM_SetCompare(htim, TIM_CHANNEL_2,0); //占空比清0,若不清会导致灯珠颜色不对
HAL_TIM_PWM_Stop_DMA(htim,TIM_CHANNEL_2);
}
}
// __HAL_TIM_SetCompare(htim, TIM_CHANNEL_2,0); //占空比清0,若不清会导致灯珠颜色不对
// HAL_TIM_PWM_Stop_DMA(htim,TIM_CHANNEL_2);
}
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_DMA_Init();
MX_TIM2_Init();
MX_TIM3_Init();
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE END WHILE */
HAL_TIM_PWM_Start_DMA(&htim2,TIM_CHANNEL_1,tim2_ccr1_value,9);
HAL_Delay(5);
HAL_TIM_PWM_Start_DMA(&htim2,TIM_CHANNEL_3,tim2_ccr1_value,9);
HAL_Delay(5);
HAL_TIM_PWM_Start_DMA(&htim3,TIM_CHANNEL_1,(uint32_t *)tim3_ccr1_value,9);
HAL_Delay(5);
HAL_TIM_PWM_Start_DMA(&htim3,TIM_CHANNEL_2,(uint32_t *)tim3_ccr1_value,9);
HAL_Delay(500);
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = 4;
RCC_OscInitStruct.PLL.PLLN = 168;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 4;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV2;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief TIM2 Initialization Function
* @param None
* @retval None
*/
static void MX_TIM2_Init(void)
{
/* USER CODE BEGIN TIM2_Init 0 */
/* USER CODE END TIM2_Init 0 */
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_OC_InitTypeDef sConfigOC = {0};
/* USER CODE BEGIN TIM2_Init 1 */
/* USER CODE END TIM2_Init 1 */
htim2.Instance = TIM2;
htim2.Init.Prescaler = 0;
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = 105;
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_PWM_Init(&htim2) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 0;
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
if (HAL_TIM_PWM_ConfigChannel(&htim2, &sConfigOC, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_PWM_ConfigChannel(&htim2, &sConfigOC, TIM_CHANNEL_3) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM2_Init 2 */
/* USER CODE END TIM2_Init 2 */
HAL_TIM_MspPostInit(&htim2);
}
/**
* @brief TIM3 Initialization Function
* @param None
* @retval None
*/
static void MX_TIM3_Init(void)
{
/* USER CODE BEGIN TIM3_Init 0 */
/* USER CODE END TIM3_Init 0 */
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_OC_InitTypeDef sConfigOC = {0};
/* USER CODE BEGIN TIM3_Init 1 */
/* USER CODE END TIM3_Init 1 */
htim3.Instance = TIM3;
htim3.Init.Prescaler = 0;
htim3.Init.CounterMode = TIM_COUNTERMODE_UP;
htim3.Init.Period = 105;
htim3.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim3.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_PWM_Init(&htim3) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim3, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 0;
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
if (HAL_TIM_PWM_ConfigChannel(&htim3, &sConfigOC, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_PWM_ConfigChannel(&htim3, &sConfigOC, TIM_CHANNEL_2) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM3_Init 2 */
/* USER CODE END TIM3_Init 2 */
HAL_TIM_MspPostInit(&htim3);
}
/**
* Enable DMA controller clock
*/
static void MX_DMA_Init(void)
{
/* DMA controller clock enable */
__HAL_RCC_DMA1_CLK_ENABLE();
/* DMA interrupt init */
/* DMA1_Stream1_IRQn interrupt configuration */
HAL_NVIC_SetPriority(DMA1_Stream1_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(DMA1_Stream1_IRQn);
/* DMA1_Stream2_IRQn interrupt configuration */
HAL_NVIC_SetPriority(DMA1_Stream2_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(DMA1_Stream2_IRQn);
/* DMA1_Stream4_IRQn interrupt configuration */
HAL_NVIC_SetPriority(DMA1_Stream4_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(DMA1_Stream4_IRQn);
/* DMA1_Stream5_IRQn interrupt configuration */
HAL_NVIC_SetPriority(DMA1_Stream5_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(DMA1_Stream5_IRQn);
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOH_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
it.c
```c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file stm32f4xx_it.c
* @brief Interrupt Service Routines.
******************************************************************************
* @attention
*
* Copyright (c) 2021 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "stm32f4xx_it.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN TD */
/* USER CODE END TD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/* External variables --------------------------------------------------------*/
extern DMA_HandleTypeDef hdma_tim2_ch1;
extern DMA_HandleTypeDef hdma_tim2_up_ch3;
extern DMA_HandleTypeDef hdma_tim3_ch1_trig;
extern DMA_HandleTypeDef hdma_tim3_ch2;
extern TIM_HandleTypeDef htim2;
extern TIM_HandleTypeDef htim3;
/* USER CODE BEGIN EV */
/* USER CODE END EV */
/******************************************************************************/
/* Cortex-M4 Processor Interruption and Exception Handlers */
/******************************************************************************/
/**
* @brief This function handles Non maskable interrupt.
*/
void NMI_Handler(void)
{
/* USER CODE BEGIN NonMaskableInt_IRQn 0 */
/* USER CODE END NonMaskableInt_IRQn 0 */
/* USER CODE BEGIN NonMaskableInt_IRQn 1 */
while (1)
{
}
/* USER CODE END NonMaskableInt_IRQn 1 */
}
/**
* @brief This function handles Hard fault interrupt.
*/
void HardFault_Handler(void)
{
/* USER CODE BEGIN HardFault_IRQn 0 */
/* USER CODE END HardFault_IRQn 0 */
while (1)
{
/* USER CODE BEGIN W1_HardFault_IRQn 0 */
/* USER CODE END W1_HardFault_IRQn 0 */
}
}
/**
* @brief This function handles Memory management fault.
*/
void MemManage_Handler(void)
{
/* USER CODE BEGIN MemoryManagement_IRQn 0 */
/* USER CODE END MemoryManagement_IRQn 0 */
while (1)
{
/* USER CODE BEGIN W1_MemoryManagement_IRQn 0 */
/* USER CODE END W1_MemoryManagement_IRQn 0 */
}
}
/**
* @brief This function handles Pre-fetch fault, memory access fault.
*/
void BusFault_Handler(void)
{
/* USER CODE BEGIN BusFault_IRQn 0 */
/* USER CODE END BusFault_IRQn 0 */
while (1)
{
/* USER CODE BEGIN W1_BusFault_IRQn 0 */
/* USER CODE END W1_BusFault_IRQn 0 */
}
}
/**
* @brief This function handles Undefined instruction or illegal state.
*/
void UsageFault_Handler(void)
{
/* USER CODE BEGIN UsageFault_IRQn 0 */
/* USER CODE END UsageFault_IRQn 0 */
while (1)
{
/* USER CODE BEGIN W1_UsageFault_IRQn 0 */
/* USER CODE END W1_UsageFault_IRQn 0 */
}
}
/**
* @brief This function handles System service call via SWI instruction.
*/
void SVC_Handler(void)
{
/* USER CODE BEGIN SVCall_IRQn 0 */
/* USER CODE END SVCall_IRQn 0 */
/* USER CODE BEGIN SVCall_IRQn 1 */
/* USER CODE END SVCall_IRQn 1 */
}
/**
* @brief This function handles Debug monitor.
*/
void DebugMon_Handler(void)
{
/* USER CODE BEGIN DebugMonitor_IRQn 0 */
/* USER CODE END DebugMonitor_IRQn 0 */
/* USER CODE BEGIN DebugMonitor_IRQn 1 */
/* USER CODE END DebugMonitor_IRQn 1 */
}
/**
* @brief This function handles Pendable request for system service.
*/
void PendSV_Handler(void)
{
/* USER CODE BEGIN PendSV_IRQn 0 */
/* USER CODE END PendSV_IRQn 0 */
/* USER CODE BEGIN PendSV_IRQn 1 */
/* USER CODE END PendSV_IRQn 1 */
}
/**
* @brief This function handles System tick timer.
*/
void SysTick_Handler(void)
{
/* USER CODE BEGIN SysTick_IRQn 0 */
/* USER CODE END SysTick_IRQn 0 */
HAL_IncTick();
/* USER CODE BEGIN SysTick_IRQn 1 */
/* USER CODE END SysTick_IRQn 1 */
}
/******************************************************************************/
/* STM32F4xx Peripheral Interrupt Handlers */
/* Add here the Interrupt Handlers for the used peripherals. */
/* For the available peripheral interrupt handler names, */
/* please refer to the startup file (startup_stm32f4xx.s). */
/******************************************************************************/
/**
* @brief This function handles DMA1 stream1 global interrupt.
*/
void DMA1_Stream1_IRQHandler(void)
{
/* USER CODE BEGIN DMA1_Stream1_IRQn 0 */
/* USER CODE END DMA1_Stream1_IRQn 0 */
//HAL_DMA_IRQHandler(&hdma_tim2_up_ch3);
HAL_DMA_IRQHandler(htim2.hdma[TIM_DMA_ID_CC3]);
/* USER CODE BEGIN DMA1_Stream1_IRQn 1 */
/* USER CODE END DMA1_Stream1_IRQn 1 */
}
/**
* @brief This function handles DMA1 stream2 global interrupt.
*/
void DMA1_Stream2_IRQHandler(void)
{
/* USER CODE BEGIN DMA1_Stream2_IRQn 0 */
/* USER CODE END DMA1_Stream2_IRQn 0 */
HAL_DMA_IRQHandler(&hdma_tim3_ch2);
/* USER CODE BEGIN DMA1_Stream2_IRQn 1 */
/* USER CODE END DMA1_Stream2_IRQn 1 */
}
/**
* @brief This function handles DMA1 stream4 global interrupt.
*/
void DMA1_Stream4_IRQHandler(void)
{
/* USER CODE BEGIN DMA1_Stream4_IRQn 0 */
/* USER CODE END DMA1_Stream4_IRQn 0 */
HAL_DMA_IRQHandler(&hdma_tim3_ch1_trig);
//HAL_DMA_IRQHandler(htim3.hdma[TIM_DMA_ID_CC1]);
/* USER CODE BEGIN DMA1_Stream4_IRQn 1 */
/* USER CODE END DMA1_Stream4_IRQn 1 */
}
/**
* @brief This function handles DMA1 stream5 global interrupt.
*/
void DMA1_Stream5_IRQHandler(void)
{
/* USER CODE BEGIN DMA1_Stream5_IRQn 0 */
/* USER CODE END DMA1_Stream5_IRQn 0 */
// HAL_DMA_IRQHandler(&hdma_tim2_ch1);
// HAL_DMA_IRQHandler(&hdma_tim3_ch2);
//HAL_TIM_PWM_PulseFinishedCallback(&htim2);
//HAL_TIM_PWM_PulseFinishedCallback(&htim3);
/*
if(DMA_GetFlagStatus(DMA1_FLAG_TC4)==SET)
{
DMA_ClearFlag(DMA1_FLAG_TC4);
}
*/
HAL_DMA_IRQHandler(htim2.hdma[TIM_DMA_ID_CC1]);
HAL_DMA_IRQHandler(htim3.hdma[TIM_DMA_ID_CC2]);
/* USER CODE BEGIN DMA1_Stream5_IRQn 1 */
/* USER CODE END DMA1_Stream5_IRQn 1 */
}
/**
* @brief This function handles TIM2 global interrupt.
*/
void TIM2_IRQHandler(void)
{
/* USER CODE BEGIN TIM2_IRQn 0 */
/* USER CODE END TIM2_IRQn 0 */
HAL_TIM_IRQHandler(&htim2);
/* USER CODE BEGIN TIM2_IRQn 1 */
/* USER CODE END TIM2_IRQn 1 */
}
/**
* @brief This function handles TIM3 global interrupt.
*/
void TIM3_IRQHandler(void)
{
/* USER CODE BEGIN TIM3_IRQn 0 */
/* USER CODE END TIM3_IRQn 0 */
HAL_TIM_IRQHandler(&htim3);
/* USER CODE BEGIN TIM3_IRQn 1 */
/* USER CODE END TIM3_IRQn 1 */
}
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
msp.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file stm32f4xx_hal_msp.c
* @brief This file provides code for the MSP Initialization
* and de-Initialization codes.
******************************************************************************
* @attention
*
* Copyright (c) 2021 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
extern DMA_HandleTypeDef hdma_tim2_ch1;
extern DMA_HandleTypeDef hdma_tim2_up_ch3;
extern DMA_HandleTypeDef hdma_tim3_ch1_trig;
extern DMA_HandleTypeDef hdma_tim3_ch2;
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN TD */
/* USER CODE END TD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN Define */
/* USER CODE END Define */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN Macro */
/* USER CODE END Macro */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* External functions --------------------------------------------------------*/
/* USER CODE BEGIN ExternalFunctions */
/* USER CODE END ExternalFunctions */
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
void HAL_TIM_MspPostInit(TIM_HandleTypeDef *htim);
/**
* Initializes the Global MSP.
*/
void HAL_MspInit(void)
{
/* USER CODE BEGIN MspInit 0 */
/* USER CODE END MspInit 0 */
__HAL_RCC_SYSCFG_CLK_ENABLE();
__HAL_RCC_PWR_CLK_ENABLE();
/* System interrupt init*/
/* USER CODE BEGIN MspInit 1 */
/* USER CODE END MspInit 1 */
}
/**
* @brief TIM_PWM MSP Initialization
* This function configures the hardware resources used in this example
* @param htim_pwm: TIM_PWM handle pointer
* @retval None
*/
void HAL_TIM_PWM_MspInit(TIM_HandleTypeDef* htim_pwm)
{
if(htim_pwm->Instance==TIM2)
{
/* USER CODE BEGIN TIM2_MspInit 0 */
/* USER CODE END TIM2_MspInit 0 */
/* Peripheral clock enable */
__HAL_RCC_TIM2_CLK_ENABLE();
/* TIM2 DMA Init */
/* TIM2_CH1 Init */
hdma_tim2_ch1.Instance = DMA1_Stream5;
hdma_tim2_ch1.Init.Channel = DMA_CHANNEL_3;
hdma_tim2_ch1.Init.Direction = DMA_MEMORY_TO_PERIPH;
hdma_tim2_ch1.Init.PeriphInc = DMA_PINC_DISABLE;
hdma_tim2_ch1.Init.MemInc = DMA_MINC_ENABLE;
hdma_tim2_ch1.Init.PeriphDataAlignment = DMA_PDATAALIGN_WORD;
hdma_tim2_ch1.Init.MemDataAlignment = DMA_MDATAALIGN_WORD;
hdma_tim2_ch1.Init.Mode = DMA_CIRCULAR;
hdma_tim2_ch1.Init.Priority = DMA_PRIORITY_LOW;
hdma_tim2_ch1.Init.FIFOMode = DMA_FIFOMODE_DISABLE;
if (HAL_DMA_Init(&hdma_tim2_ch1) != HAL_OK)
{
Error_Handler();
}
__HAL_LINKDMA(htim_pwm,hdma[TIM_DMA_ID_CC1],hdma_tim2_ch1);
/*****************************20211217添加***************************************/
HAL_NVIC_SetPriority(DMA1_Stream5_IRQn, 0, 1);//使用中断可开启
HAL_NVIC_EnableIRQ(DMA1_Stream5_IRQn);
/*****************************20211217添加***************************************/
/* TIM2_UP_CH3 Init */
hdma_tim2_up_ch3.Instance = DMA1_Stream1;
hdma_tim2_up_ch3.Init.Channel = DMA_CHANNEL_3;
hdma_tim2_up_ch3.Init.Direction = DMA_MEMORY_TO_PERIPH;
hdma_tim2_up_ch3.Init.PeriphInc = DMA_PINC_DISABLE;
hdma_tim2_up_ch3.Init.MemInc = DMA_MINC_ENABLE;
hdma_tim2_up_ch3.Init.PeriphDataAlignment = DMA_PDATAALIGN_WORD;
hdma_tim2_up_ch3.Init.MemDataAlignment = DMA_MDATAALIGN_WORD;
hdma_tim2_up_ch3.Init.Mode = DMA_NORMAL;
hdma_tim2_up_ch3.Init.Priority = DMA_PRIORITY_LOW;
hdma_tim2_up_ch3.Init.FIFOMode = DMA_FIFOMODE_DISABLE;
if (HAL_DMA_Init(&hdma_tim2_up_ch3) != HAL_OK)
{
Error_Handler();
}
/* Several peripheral DMA handle pointers point to the same DMA handle.
Be aware that there is only one stream to perform all the requested DMAs. */
__HAL_LINKDMA(htim_pwm,hdma[TIM_DMA_ID_UPDATE],hdma_tim2_up_ch3);
__HAL_LINKDMA(htim_pwm,hdma[TIM_DMA_ID_CC3],hdma_tim2_up_ch3);
/*****************************20211217添加***************************************/
HAL_NVIC_SetPriority(DMA1_Stream1_IRQn, 0, 1);//使用中断可开启
HAL_NVIC_EnableIRQ(DMA1_Stream1_IRQn);
/*****************************20211217添加***************************************/
/* TIM2 interrupt Init */
//HAL_NVIC_SetPriority(TIM2_IRQn, 0, 0);
//HAL_NVIC_EnableIRQ(TIM2_IRQn);
/* USER CODE BEGIN TIM2_MspInit 1 */
/* USER CODE END TIM2_MspInit 1 */
}
else if(htim_pwm->Instance==TIM3)
{
/* USER CODE BEGIN TIM3_MspInit 0 */
/* USER CODE END TIM3_MspInit 0 */
/* Peripheral clock enable */
__HAL_RCC_TIM3_CLK_ENABLE();
/* TIM3 DMA Init */
/* TIM3_CH1_TRIG Init */
hdma_tim3_ch1_trig.Instance = DMA1_Stream4;
hdma_tim3_ch1_trig.Init.Channel = DMA_CHANNEL_5;
hdma_tim3_ch1_trig.Init.Direction = DMA_MEMORY_TO_PERIPH;
hdma_tim3_ch1_trig.Init.PeriphInc = DMA_PINC_DISABLE;
hdma_tim3_ch1_trig.Init.MemInc = DMA_MINC_ENABLE;
hdma_tim3_ch1_trig.Init.PeriphDataAlignment = DMA_PDATAALIGN_HALFWORD;
hdma_tim3_ch1_trig.Init.MemDataAlignment = DMA_MDATAALIGN_HALFWORD;
hdma_tim3_ch1_trig.Init.Mode = DMA_NORMAL;
hdma_tim3_ch1_trig.Init.Priority = DMA_PRIORITY_LOW;
hdma_tim3_ch1_trig.Init.FIFOMode = DMA_FIFOMODE_DISABLE;
if (HAL_DMA_Init(&hdma_tim3_ch1_trig) != HAL_OK)
{
Error_Handler();
}
/* Several peripheral DMA handle pointers point to the same DMA handle.
Be aware that there is only one stream to perform all the requested DMAs. */
__HAL_LINKDMA(htim_pwm,hdma[TIM_DMA_ID_CC1],hdma_tim3_ch1_trig);
__HAL_LINKDMA(htim_pwm,hdma[TIM_DMA_ID_TRIGGER],hdma_tim3_ch1_trig);
HAL_NVIC_SetPriority(DMA1_Stream4_IRQn, 0, 1);//使用中断可开启
HAL_NVIC_EnableIRQ(DMA1_Stream4_IRQn);
/* TIM3_CH2 Init */
hdma_tim3_ch2.Instance = DMA1_Stream5;
hdma_tim3_ch2.Init.Channel = DMA_CHANNEL_5;
hdma_tim3_ch2.Init.Direction = DMA_MEMORY_TO_PERIPH;
hdma_tim3_ch2.Init.PeriphInc = DMA_PINC_DISABLE;
hdma_tim3_ch2.Init.MemInc = DMA_MINC_ENABLE;
hdma_tim3_ch2.Init.PeriphDataAlignment = DMA_PDATAALIGN_HALFWORD;
hdma_tim3_ch2.Init.MemDataAlignment = DMA_MDATAALIGN_HALFWORD;
hdma_tim3_ch2.Init.Mode = DMA_CIRCULAR;
hdma_tim3_ch2.Init.Priority = DMA_PRIORITY_VERY_HIGH;
hdma_tim3_ch2.Init.FIFOMode = DMA_FIFOMODE_DISABLE;
if (HAL_DMA_Init(&hdma_tim3_ch2) != HAL_OK)
{
Error_Handler();
}
__HAL_LINKDMA(htim_pwm,hdma[TIM_DMA_ID_CC2],hdma_tim3_ch2);
/* TIM3 interrupt Init */
//HAL_NVIC_SetPriority(TIM3_IRQn, 0, 0);
//HAL_NVIC_EnableIRQ(TIM3_IRQn);
/* USER CODE BEGIN TIM3_MspInit 1 */
/*****************************20211217添加***************************************/
HAL_NVIC_SetPriority(DMA1_Stream5_IRQn, 0, 1);//使用中断可开启
HAL_NVIC_EnableIRQ(DMA1_Stream5_IRQn);
/*****************************20211217添加***************************************/
/* USER CODE END TIM3_MspInit 1 */
}
}
void HAL_TIM_MspPostInit(TIM_HandleTypeDef* htim)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(htim->Instance==TIM2)
{
/* USER CODE BEGIN TIM2_MspPostInit 0 */
/* USER CODE END TIM2_MspPostInit 0 */
__HAL_RCC_GPIOA_CLK_ENABLE();
/**TIM2 GPIO Configuration
PA0-WKUP ------> TIM2_CH1
PA2 ------> TIM2_CH3
*/
GPIO_InitStruct.Pin = GPIO_PIN_0|GPIO_PIN_2;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
GPIO_InitStruct.Alternate = GPIO_AF1_TIM2;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* USER CODE BEGIN TIM2_MspPostInit 1 */
/* USER CODE END TIM2_MspPostInit 1 */
}
else if(htim->Instance==TIM3)
{
/* USER CODE BEGIN TIM3_MspPostInit 0 */
/* USER CODE END TIM3_MspPostInit 0 */
__HAL_RCC_GPIOA_CLK_ENABLE();
/**TIM3 GPIO Configuration
PA6 ------> TIM3_CH1
PA7 ------> TIM3_CH2
*/
GPIO_InitStruct.Pin = GPIO_PIN_6|GPIO_PIN_7;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
GPIO_InitStruct.Alternate = GPIO_AF2_TIM3;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* USER CODE BEGIN TIM3_MspPostInit 1 */
/* USER CODE END TIM3_MspPostInit 1 */
}
}
/**
* @brief TIM_PWM MSP De-Initialization
* This function freeze the hardware resources used in this example
* @param htim_pwm: TIM_PWM handle pointer
* @retval None
*/
void HAL_TIM_PWM_MspDeInit(TIM_HandleTypeDef* htim_pwm)
{
if(htim_pwm->Instance==TIM2)
{
/* USER CODE BEGIN TIM2_MspDeInit 0 */
/* USER CODE END TIM2_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_TIM2_CLK_DISABLE();
/* TIM2 DMA DeInit */
HAL_DMA_DeInit(htim_pwm->hdma[TIM_DMA_ID_CC1]);
HAL_DMA_DeInit(htim_pwm->hdma[TIM_DMA_ID_UPDATE]);
HAL_DMA_DeInit(htim_pwm->hdma[TIM_DMA_ID_CC3]);
/* TIM2 interrupt DeInit */
HAL_NVIC_DisableIRQ(TIM2_IRQn);
/* USER CODE BEGIN TIM2_MspDeInit 1 */
/* USER CODE END TIM2_MspDeInit 1 */
}
else if(htim_pwm->Instance==TIM3)
{
/* USER CODE BEGIN TIM3_MspDeInit 0 */
/* USER CODE END TIM3_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_TIM3_CLK_DISABLE();
/* TIM3 DMA DeInit */
HAL_DMA_DeInit(htim_pwm->hdma[TIM_DMA_ID_CC1]);
HAL_DMA_DeInit(htim_pwm->hdma[TIM_DMA_ID_TRIGGER]);
HAL_DMA_DeInit(htim_pwm->hdma[TIM_DMA_ID_CC4]);
HAL_DMA_DeInit(htim_pwm->hdma[TIM_DMA_ID_UPDATE]);
/* TIM3 interrupt DeInit */
HAL_NVIC_DisableIRQ(TIM3_IRQn);
/* USER CODE BEGIN TIM3_MspDeInit 1 */
/* USER CODE END TIM3_MspDeInit 1 */
}
}
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */






