//头文件
```class IDC_DLL_CLASS CComDevice
{
//串口类方法
public:
CComDevice();
virtual ~CComDevice();
//打开串口
int Open(char * , LPDCB);
//关闭串口
int Close();
//读串口收到的数据(一次)
int Read(char *, DWORD);
//读串口收到的数据(同步)
int WaitRead(char *, DWORD, DWORD, DWORD);
//向串口写数据(同步)
int Write(char *, DWORD, DWORD);
//串口类属性
public:
DWORD m_error_code;//最后一次操作错误码(windows定义)
DCB m_state;//串口配置
HANDLE m_handle; //串口句柄
COMMTIMEOUTS m_Timeouts;//读写超时时间
};
//串口打开
int CComDevice::Open(char * Port , LPDCB lpDCB)
{
//操作错误码复位
this->m_error_code = 0;
//判断串口是否已经打开
if (this->m_handle != NULL)
{
printf("串口打开失败");
return -1;
}
//打开串口文件
this->m_handle = ::CreateFileA(Port, GENERIC_READ | GENERIC_WRITE,
0,
NULL,
OPEN_EXISTING,
FILE_ATTRIBUTE_NORMAL | FILE_FLAG_OVERLAPPED,
NULL);
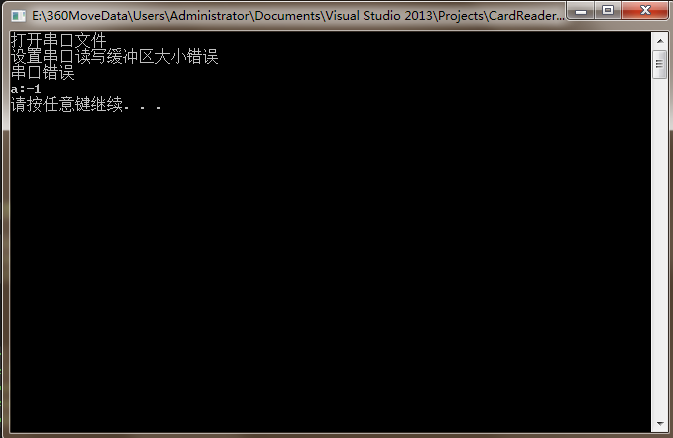
printf("打开串口文件");
printf("\n");
if (this->m_handle == INVALID_HANDLE_VALUE)
{
this->m_error_code = ::GetLastError();//获取错误码
this->m_handle = NULL;//串口句柄置空
printf("系统错误\n");
return -2;
}
try
{
//设置串口读写缓冲区大小
if (!SetupComm(this->m_handle, 2048, 2048))
printf("\n");
printf("设置串口读写缓冲区大小错误"); //配置失败
throw(FALSE);
//终止串口所有异步读写操作并清空读写缓冲区
if (!PurgeComm(this->m_handle, PURGE_TXABORT | PURGE_RXABORT |
PURGE_TXCLEAR | PURGE_RXCLEAR))
printf("\n");
printf("终止串口所有异步读写操作并清空读写缓冲区错误");
throw(FALSE);
//获取串口默认配置
if (!GetCommState(this->m_handle, &this->m_state))
printf("\n");
printf("获取串口默认配置错误");
throw(FALSE);
this->m_state.DCBlength = sizeof(DCB); //DCB长度
this->m_state.BaudRate = lpDCB->BaudRate; //波特率
this->m_state.ByteSize = lpDCB->ByteSize; //通信字节位数
this->m_state.Parity = lpDCB->Parity;//奇偶校验位
this->m_state.StopBits = lpDCB->StopBits; //停止位
this->m_state.fOutxDsrFlow = lpDCB->fOutxDsrFlow;
this->m_state.fDtrControl = lpDCB->fDtrControl;
this->m_state.fOutxCtsFlow = lpDCB->fOutxCtsFlow;
this->m_state.fRtsControl = lpDCB->fRtsControl;
this->m_state.fInX = lpDCB->fInX;
this->m_state.fOutX = lpDCB->fInX;
this->m_state.XonChar = lpDCB->XonChar;
this->m_state.XoffChar = lpDCB->XoffChar;
this->m_state.XonLim = lpDCB->XonLim;//指定在XON字符发送之前接收缓冲区中空缓冲区可允许的最小字节数
this->m_state.XoffLim = lpDCB->XoffLim;//指定在XOFF字符发送之前接收缓冲区中空缓冲区可允许的最小字节数
this->m_state.fBinary = lpDCB->fBinary;
this->m_state.fParity = lpDCB->fParity;
//设置串口制订配置
if (!SetCommState(this->m_handle, &(this->m_state)))
printf("\n");
printf("配置错误");
throw(FALSE);
}
catch (BOOL)
{
this->m_error_code = ::GetLastError();//获取错误码
::CloseHandle(this->m_handle);//关闭串口
this->m_handle = NULL;//串口句柄置空
printf("\n串口错误"); //------>程序运行到这里卡住
return -1;
}
printf("打开串口成功");
return 0;
}
//main函数打开串口int _tmain(int argc, _TCHAR* argv[])`
{
CComDevice CardReader;
DCB DCB_COM;
DCB_COM.DCBlength = 50;
DCB_COM.BaudRate = CBR_9600; // 设置波特率9600
DCB_COM.fBinary = TRUE; // 设置二进制模式,此处必须设置TRUE
DCB_COM.fParity = TRUE; // 支持奇偶校验
DCB_COM.fOutxCtsFlow = FALSE; // No CTS output flow control
DCB_COM.fOutxDsrFlow = FALSE; // No DSR output flow control
DCB_COM.fDtrControl = DTR_CONTROL_DISABLE; // No DTR flow control
DCB_COM.XonChar = 0;
DCB_COM.XoffChar = 0;
DCB_COM.XonLim = 100;
DCB_COM.XoffLim = 100;
//DCB_COM.fDsrSensitivity = FALSE; // DSR sensitivity
//DCB_COM.fTXContinueOnXoff = TRUE; // XOFF continues Tx
DCB_COM.fOutX = FALSE; // No XON/XOFF out flow control
DCB_COM.fInX = FALSE; // No XON/XOFF in flow control
//DCB_COM.fErrorChar = FALSE; // Disable error replacement
//DCB_COM.fNull = FALSE; // Disable null stripping
DCB_COM.fRtsControl = RTS_CONTROL_DISABLE; //No RTS flow control
//DCB_COM.fAbortOnError = FALSE; // 当串口发生错误,并不终止串口读写
DCB_COM.ByteSize = 8; // 数据位,范围:4-8
DCB_COM.Parity = NOPARITY; // 校验模式
DCB_COM.StopBits = 0; // 1位停止位
int a = CardReader.Open("COM5", &DCB_COM);
cout << "\na:" << a << endl;
system("pause");
return 0;
}