关注
码龄
粉丝数
原力等级 --
被采纳
被点赞
采纳率
墨星先生
2022-05-20 09:59
采纳率: 100%
浏览 18
首页
编程语言
已结题
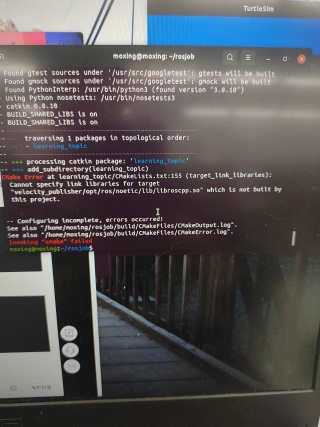
关于#ubuntu#的问题:ros用c++编译报错
c++
ubuntu
linux
ros用c++编译报错 CMake Error 错误。不知道哪里的原因。
收起
写回答
好问题
0
提建议
关注问题
微信扫一扫
点击复制链接
分享
邀请回答
编辑
收藏
删除
收藏
举报
1
条回答
默认
最新
关注
码龄
粉丝数
原力等级 --
被采纳
被点赞
采纳率
逍遥xiaoy
2022-05-20 10:30
关注
链接不到报错的那个文件,可以看看文件是否存在,存在的话看一下是否有权限访问
本回答被题主选为最佳回答
, 对您是否有帮助呢?
本回答被专家选为最佳回答
, 对您是否有帮助呢?
本回答被题主和专家选为最佳回答
, 对您是否有帮助呢?
解决
1
无用
评论
打赏
微信扫一扫
点击复制链接
分享
举报
评论
按下Enter换行,Ctrl+Enter发表内容
查看更多回答(0条)
向“C知道”追问
报告相同问题?
提交
关注问题
Ubuntu
18.04下
Ros
melodic
编译
C++
失败,头文件
报错
2023-12-29 15:05
richlee2001的博客
检查后发现是
Ubuntu
下gcc/g++版本的
问题
,之前因为电脑跑深度学习降低了gcc/g++版本,为5.5版本。官方源下载,跟着教程跑的代码,
编译
进度卡在50%,头文件
报错
。随后再运行catkin_make,
编译
成功。
【
ROS
】
ROS
2编程示例:服务和客户端-
C++
版
2023-06-03 08:00
郭老二的博客
ROS
2入门
C++
示例:服务端和客户端;包括安装、配置、编辑、
编译
、运行
ubuntu
20.04自建
ros
c++
功能包简易步骤(按思维常理的步骤)
2024-07-09 10:35
WXYANXW的博客
查看整体
编译
的结果,如果有
报错
可能是CMakeLists.txt中的语法错误,仔细检查,可以在评论区下面问。add_executable(你想要的节点名字 src/你想执行的cpp代码)3.打开cpp_test里的src文件夹,把刚写的test.cpp放进去...
Ubuntu
22.04、
ROS
2安装MAV
ROS
报错
及解决
2025-04-14 09:59
LeoZack的博客
官网只提供了在
ubuntu
20.04环境下mav
ros
的安装教程,这里我决定直接从github上下载源码进行
编译
安装。
ARM64架构
Ubuntu
20.04下用vscode编写
ros
无法正确配置
c++
14以上标准的intellisense
问题
2024-10-21 16:09
Notilly6324的博客
解决ARM64架构
Ubuntu
20.04下用vscode编写
ros
无法正确配置
c++
14以上标准的intellisense
问题
ROS
学习笔记(二)在VScode上启动
ros
编译
C++
程序
2024-09-17 14:15
不会编程的同学的博客
点开这里的cmake文件:我们需要修改这两个地方,并且修改完记得把语段前后的注释给删去:修改完相应的文件名之后,可以开始
编译
(以后都是ctrl+shift+b)啦~
【
ROS
】
ROS
2编程示例:话题订阅-发布-
C++
版
2023-06-01 10:02
郭老二的博客
超详细完整示例:安装
ROS
2、创建功能包、编辑、配置、
编译
、运行、错误处理、代码逐行注释
ros
编译
运行
C++
、python(二)
2022-03-11 09:50
啥也不是的py人的博客
然后cd再进入工作空间调用 catkin_make命令
编译
。 进入 src 创建
ros
包并添加依赖 cd src catkin_create_pkg 自定义
ROS
包名
ros
cpp
ros
py std_msgs 上述命令,会在工作空间下生成一个功能包,该功能包依赖于 ...
报错
日志1:terminate called after throwing an instance of ‘
ros
::TimeNotInitializedException‘——
ROS
项目
报错
2022-10-13 12:23
Kamen Black君的博客
开这个专题的主要原因是心血来潮,想和大家以一种诙(shen)谐(jing)有(bing)趣(fa)的笔调分享一下我在编程过程中,遇到的各式各样的
报错
(唯一的共同点就是都令人心脏骤停,血压飙升)。希望大家在看的开心的...
VScode 使用教程——
ros
下
编译
C/
C++
代码
2023-04-01 12:34
啵啵鱼爱吃小猫咪的博客
VScode 使用教程——
ros
下
编译
C/
C++
代码
没有解决我的问题,
去提问
向专家提问
向AI提问
付费问答(悬赏)服务下线公告
◇ 用户帮助中心
◇ 新手如何提问
◇ 奖惩公告
问题事件
关注
码龄
粉丝数
原力等级 --
被采纳
被点赞
采纳率
系统已结题
6月2日
关注
码龄
粉丝数
原力等级 --
被采纳
被点赞
采纳率
已采纳回答
5月25日
关注
码龄
粉丝数
原力等级 --
被采纳
被点赞
采纳率
创建了问题
5月20日

 分享
分享 分享
分享 系统已结题
6月2日
系统已结题
6月2日 已采纳回答
5月25日
创建了问题
5月20日
已采纳回答
5月25日
创建了问题
5月20日

