在用摄像头采集了相机张片后进行标定时,cv2.calibrateCamera这个API总是报错,求原因和解决方法


 分享
分享
 关注
关注原因
1、该错误表示作为参数提供的向量之一为空。
如果不是所有条件都满足,该函数有一个断言阻止您使用它。这次它检查是否有足够的图像点(nimages > 0必须为真)。
2、发生错误是因为您没有足够的图像点。由于以下原因:
该算法循环遍历您的每一张图像,但无法检测到棋盘(否则您会看到消息“检测到棋盘!”)。
由于它无法检测到棋盘,因此 img_points 数组保持为空并按原样发送到 calibrateCamera 函数。calibrateCamera 函数有一个内部断言,如果没有图像点,您将无法使用它。
解决方法
1、查看图片路径是否正确
2、拍摄更多或更好的照片。
可以查看有的教程中的第 3 步:https ://medium.com/@omar.ps16/stereo-3d-reconstruction-with-opencv-using-an-iphone-camera-part-ii-77754b58bfe0
或者您可以查看此资源:http ://aishack.in/tutorials/calibrating-undistorting-opencv-oh-yeah/
无论如何,问题很可能出在您拍摄照片的方式上,而不是代码本身。
另外
作为一般经验法则:
参考:
https://github.com/OmarPadierna/3DReconstruction/issues/2
除此之外
另外一件事,您应该在进行校准之前检查它们是否有点,
例如添加以下代码:
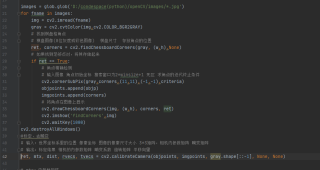
if len(objpoints) == len(imgpoints) and len(objpoints) > 0:
ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(objpoints, imgpoints, gray.shape[::-1],None,None)
else:
print("not enough points to calibrate")
如有问题及时沟通
分享 系统已结题
6月3日
系统已结题
6月3日 修改了问题
5月26日
创建了问题
5月26日
修改了问题
5月26日
创建了问题
5月26日



