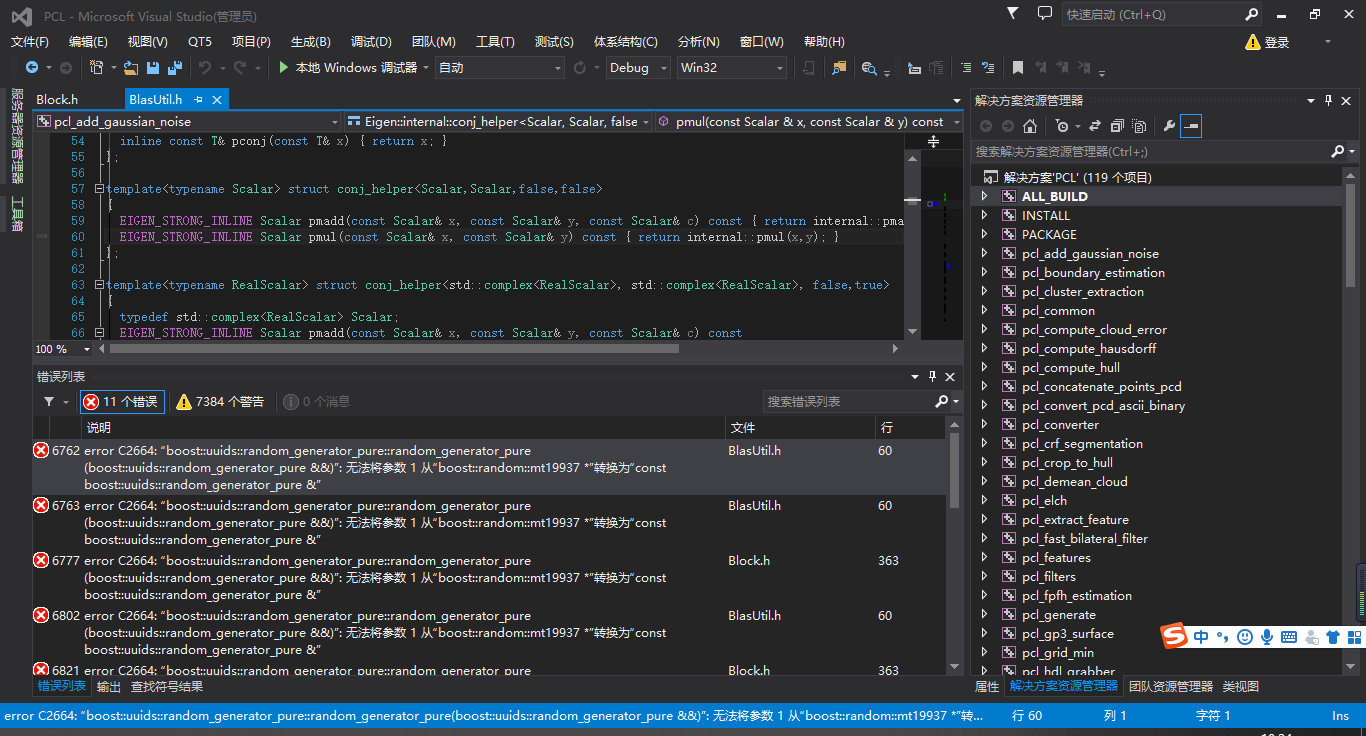

PCL编译“boost::random::mt19937 *”转换为“const boost::uuids::random_generator_pure &”失败

- 写回答
- 好问题 0 提建议
- 关注问题
 分享
分享- 邀请回答
-

1条回答 默认 最新

- 刘江涛的博客 CMakeFiles/main.dir/main.cpp.o:在函数‘boost::this_thread::sleep(boost::posix_time::ptime const&)’中: main.cpp:(.text._ZN5boost11this_thread5sleepERKNS_10posix_time5ptimeE[_ZN5boost11this_...
- 2021-01-05 21:52一叶孤舟渡的博客 boost::make_shared换成std::make_shared 这样试一下
- 星云之叹的博客 将上述代码更新为: std::this_thread::sleep_for(std::chrono::microseconds(100000));
- 2022-09-27 02:27无水先生的博客 boost::shared_ptr是另一个智能指针,与 boost::scoped_ptr有很大不同,本文阐述这种区别。
- 2021-11-23 17:43
 无法从“boost::shared_ptr<pcl::RangeImage>”转换为“const std::shared_ptr<const pcl::PointCloud<pcl::PointWit躺躺11的博客 无法从“boost::shared_ptrpcl::RangeImage”转换为“const std::shared_ptr<const pcl::PointCloudpcl::PointWithRange>” 5.2可视化深度图像 报错: 源码: pcl::visualization::...
无法从“boost::shared_ptr<pcl::RangeImage>”转换为“const std::shared_ptr<const pcl::PointCloud<pcl::PointWit躺躺11的博客 无法从“boost::shared_ptrpcl::RangeImage”转换为“const std::shared_ptr<const pcl::PointCloudpcl::PointWithRange>” 5.2可视化深度图像 报错: 源码: pcl::visualization::... - 2022-02-12 15:37moneymyone的博客 解决ubuntu使用boost::this_thread报错
- 点云渣的博客 使用boost::this_thread报错,error LNK2019: 无法解析的外部符号 "bool __cdecl boost::this_thread::interruptible_wait(void *,struct boost::detail::mono_platform_timepoint const &)
- 2021-09-19 14:20昵称不能为——的博客 undefined reference to boost::system::system_category() https://stackoverflow.com/questions/9723793/undefined-reference-to-boostsystemsystem-category-when-compiling/50146757#50146757 ...
- 2022-03-14 11:38fightforglory的博客 ROS编译,boost报错,找得到头文件,但是找不到.so链接库
- 2019-01-20 23:05程序猿小泽的博客 pcl::PointCloud 和 pcl::PointCloud::Ptr类型的转换 加了ptr的是指针类型,两者可以互相转换 1.PointCloud::Ptr—>PointCloud pcl::PointCloud<pcl::PointXYZ> cloud; pcl::PointCloud<...
- 2022-05-22 21:28 PCL报错集——error 2664 无法将参数 1 从“std::shared_ptr”转换为“const boost::shared_ptr<const pcl::PointRepresentat诺的博客 PCL报错集——error 2664 无法将参数 1 从“std::shared_ptr”转换为“const boost::shared_ptr<const pcl::PointRepresentat 在用PCL1.8跑连续多幅点云配准的代码时。 在配准函数的非线性ICP代码中 存在报错: ...
- 机器人学渣的博客 利用CMake编译PCL时编译报错: /usr/bin/ld: CMakeFiles/MYSLAM.dir/src/voslam.cpp.o:(.data.rel.ro._ZTVN3pcl7PCLBaseINS_12PointXYZRGBAEEE[_ZTVN3pcl7PCLBaseINS_12PointXYZRGBAEEE]+0x20): undefined reference...
- 2020-11-19 20:46HelloVanvan的博客 如果不是你没有链接boost的问题那就是版本问题,我用的boost1.61出现了这个问题,然后使用boost1.53就不会出错了
- 2018-02-20 12:09AI算法网奇的博客 class boost::system::error_category const & __cdecl boost::system::system_category(void)原创 2013年12月05日 11:26:243344error LNK2019: 无法解析的外部符号 "class boost::system::error_...
- 2025-05-30 10:40翟天保Steven的博客 解决__cplusplus宏的值始终为199711L(即 C++98)的问题
- 2021-03-17 19:10 ‘pcl::visualization::CloudViewer::showCloud(boost::shared_ptr<pcl::PointCloud<pcl::PointXY...’未定义的引用Unite One的博客 ubuntu18编译ubuntu16的ros功能包时,pcl 1.8报错: CMakeFiles/velodyne_imu_gps.dir/src/velodyne_imu_gps.cpp.o:在函数‘chatterCallback(boost::shared_ptr<sensor_msgs::PointCloud2_<std::allocator<...
- 2022-05-11 16:56金枪鱼蟹黄酱的博客 我的PCL 安装 以及错误 记录 首先安装相关依赖后,开始安装PCL。 git clone -b pcl-1.12.1 https://github.com/PointCloudLibrary/pcl.git cd pcl && mkdir build && cd build cmake .. make -j2 //...
- 2019-01-15 16:54菜鸟知识搬运工的博客 pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);//初始点云对象 cloud->width = 100; cloud->height = 1; cloud->resize(cloud->width*cloud->height); for (int i = 0; i ...
- 2019-05-17 15:00qq_35515203的博客 读取时使用语句为, pcl::io::loadPCDFile<PointT>("file.pcd", *Ptr) 编译时出现中断的位置如上图所示,位于pcd::io.h第214行。 将读取语句改为以下语句后,中断消失,可以成功读取文件。 pcl::...
- 没有解决我的问题, 去提问