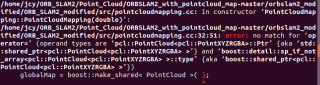
编译高博的orbslam2_modified的时候遇pointcloudmapping.cc的问题,在网上搜索后,找到一个回答是在pointcloudmapping.cc中添加#include <boost/make_shared.hpp>,但并没有解决问题,麻烦各位看看如何解决,谢谢。

 分享
分享
globalMap是std::shared_prtr<PointCloud>类型,等号右边创建的是boost::shared_ptr<PointCloud>类型,两个类型不一样,不能赋值。
你可以把boost::make_shared<PointCloud>()改为std::make_shared<PointCloud>()
分享 系统已结题
9月26日
系统已结题
9月26日 已采纳回答
9月18日
创建了问题
9月18日
已采纳回答
9月18日
创建了问题
9月18日


