
A*算法仿真实验修改搜寻格大小后无法准确避障
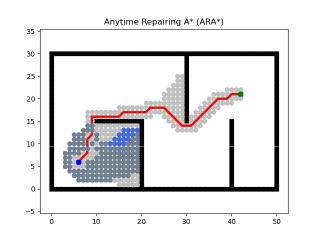
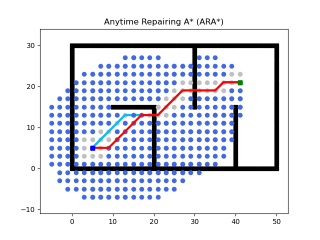
使用A算法仿真路径规划算法,第一张图是设置搜寻最小格子单位是1,障碍物也是由单位为1的格子组成,运行成功,能成功避障并且找到终点;第二张图是将搜寻格子设置成2,障碍物还是单位1的格子,此时已无法避障,想请教这个问题如何解决。
具体代码如下:
主算法:
"""
ARA_star 2D (Anytime Repairing A)
g(s) decreased introduces a local inconsistency between s and its successors.
"""
import os
import sys
import math
sys.path.append(os.path.dirname(os.path.abspath(file)) +
"/../../Search_based_Planning/")
from Search_2D import plotting, env
class AraStar:
def init(self, s_start, s_goal, e, heuristic_type):
self.s_start, self.s_goal = s_start, s_goal
self.heuristic_type = heuristic_type
self.Env = env.Env() # class Env
self.u_set = self.Env.motions # feasible input set
self.obs = self.Env.obs # position of obstacles
self.e = e # weight
self.g = dict() # Cost to come
self.OPEN = dict() # priority queue / OPEN set
self.CLOSED = set() # CLOSED set
self.INCONS = {} # INCONSISTENT set
self.PARENT = dict() # relations
self.path = [] # planning path
self.visited = [] # order of visited nodes
def init(self):
"""
initialize each set.
"""
self.g[self.s_start] = 0.0
self.g[self.s_goal] = math.inf
self.OPEN[self.s_start] = self.f_value(self.s_start)
self.PARENT[self.s_start] = self.s_start
def searching(self):
self.init()
self.ImprovePath()
self.path.append(self.extract_path())
while self.update_e() > 1: # continue condition
self.e -= 0.6 # increase weight
self.OPEN.update(self.INCONS)
self.OPEN = {s: self.f_value(s) for s in self.OPEN} # update f_value of OPEN set
self.INCONS = dict()
self.CLOSED = set()
self.ImprovePath() # improve path
self.path.append(self.extract_path())
return self.path, self.visited
def ImprovePath(self):
"""
:return: a e'-suboptimal path
"""
visited_each = []
while True:
s, f_small = self.calc_smallest_f()
if self.f_value(self.s_goal) <= f_small:
break
self.OPEN.pop(s)
self.CLOSED.add(s)
for s_n in self.get_neighbor(s):
if s_n in self.obs:
continue
new_cost = self.g[s] + self.cost(s, s_n)
if s_n not in self.g or new_cost < self.g[s_n]:
self.g[s_n] = new_cost
self.PARENT[s_n] = s
visited_each.append(s_n)
if s_n not in self.CLOSED:
self.OPEN[s_n] = self.f_value(s_n)
else:
self.INCONS[s_n] = 0.0
self.visited.append(visited_each)
def calc_smallest_f(self):
"""
:return: node with smallest f_value in OPEN set.
"""
s_small = min(self.OPEN, key=self.OPEN.get)
return s_small, self.OPEN[s_small]
def get_neighbor(self, s):
"""
find neighbors of state s that not in obstacles.
:param s: state
:return: neighbors
"""
return {(s[0] + u[0], s[1] + u[1]) for u in self.u_set}
def update_e(self):
v = float("inf")
if self.OPEN:
v = min(self.g[s] + self.h(s) for s in self.OPEN)
if self.INCONS:
v = min(v, min(self.g[s] + self.h(s) for s in self.INCONS))
return min(self.e, self.g[self.s_goal] / v)
def f_value(self, x):
"""
f = g + e * h
f = cost-to-come + weight * cost-to-go
:param x: current state
:return: f_value
"""
return self.g[x] + self.e * self.h(x)
def extract_path(self):
"""
Extract the path based on the PARENT set.
:return: The planning path
"""
path = [self.s_goal]
s = self.s_goal
while True:
s = self.PARENT[s]
path.append(s)
if s == self.s_start:
break
return list(path)
def h(self, s):
"""
Calculate heuristic.
:param s: current node (state)
:return: heuristic function value
"""
heuristic_type = self.heuristic_type # heuristic type
goal = self.s_goal # goal node
if heuristic_type == "manhattan":
return abs(goal[0] - s[0]) + abs(goal[1] - s[1])
else:
return math.hypot(goal[0] - s[0], goal[1] - s[1])
def cost(self, s_start, s_goal):
"""
Calculate Cost for this motion
:param s_start: starting node
:param s_goal: end node
:return: Cost for this motion
:note: Cost function could be more complicate!
"""
if self.is_collision(s_start, s_goal):
return math.inf
return math.hypot(s_goal[0] - s_start[0], s_goal[1] - s_start[1])
def is_collision(self, s_start, s_end):
"""
check if the line segment (s_start, s_end) is collision.
:param s_start: start node
:param s_end: end node
:return: True: is collision / False: not collision
"""
if s_start in self.obs or s_end in self.obs:
return True
if s_start[0] != s_end[0] and s_start[1] != s_end[1]:
if s_end[0] - s_start[0] == s_start[1] - s_end[1]:
s1 = (min(s_start[0], s_end[0]), min(s_start[1], s_end[1]))
s2 = (max(s_start[0], s_end[0]), max(s_start[1], s_end[1]))
else:
s1 = (min(s_start[0], s_end[0]), max(s_start[1], s_end[1]))
s2 = (max(s_start[0], s_end[0]), min(s_start[1], s_end[1]))
if s1 in self.obs or s2 in self.obs:
return True
return False
def main():
s_start = (5,5)
s_goal = (41, 21)
arastar = AraStar(s_start, s_goal, 2.5, "euclidean")
plot = plotting.Plotting(s_start, s_goal)
path, visited = arastar.searching()
plot.animation_ara_star(path, visited, "Anytime Repairing A* (ARA*)")
if name == 'main':
main()
生成环境算法:
"""
Env 2D
"""
class Env:
def init(self):
self.x_range = 51 # size of background
self.y_range = 31
self.motions = [(-2, 0), (-2, 2), (0, 2), (2, 2),
(2, 0), (2, -2), (0, -2), (-2, -2)]
self.obs = self.obs_map()
def update_obs(self, obs):
self.obs = obs
def obs_map(self):
"""
Initialize obstacles' positions
:return: map of obstacles
"""
x = self.x_range
y = self.y_range
obs = set()
for i in range(x):
obs.add((i, 0))
for i in range(x):
obs.add((i, y - 1))
for i in range(y):
obs.add((0, i))
for i in range(y):
obs.add((x - 1, i))
for i in range(10, 21):
obs.add((i, 15))
for i in range(15):
obs.add((20, i))
for i in range(15, 30):
obs.add((30, i))
for i in range(16):
obs.add((40, i))
return obs
绘图算法:
"""
Plot tools 2D
"""
import os
import sys
import matplotlib.pyplot as plt
sys.path.append(os.path.dirname(os.path.abspath(file)) +
"/../../Search_based_Planning/")
from Search_2D import env
class Plotting:
def init(self, xI, xG):
self.xI, self.xG = xI, xG
self.env = env.Env()
self.obs = self.env.obs_map()
def update_obs(self, obs):
self.obs = obs
def animation(self, path, visited, name):
self.plot_grid(name)
self.plot_visited(visited)
self.plot_path(path)
plt.show()
def animation_lrta(self, path, visited, name):
self.plot_grid(name)
cl = self.color_list_2()
path_combine = []
for k in range(len(path)):
self.plot_visited(visited[k], cl[k])
plt.pause(0.2)
self.plot_path(path[k])
path_combine += path[k]
plt.pause(0.2)
if self.xI in path_combine:
path_combine.remove(self.xI)
self.plot_path(path_combine)
plt.show()
def animation_ara_star(self, path, visited, name):
self.plot_grid(name)
cl_v, cl_p = self.color_list()
for k in range(len(path)):
self.plot_visited(visited[k], cl_v[k])
self.plot_path(path[k], cl_p[k], True)
plt.pause(0.5)
plt.show()
def animation_bi_astar(self, path, v_fore, v_back, name):
self.plot_grid(name)
self.plot_visited_bi(v_fore, v_back)
self.plot_path(path)
plt.show()
def plot_grid(self, name):
obs_x = [x[0] for x in self.obs]
obs_y = [x[1] for x in self.obs]
plt.plot(self.xI[0], self.xI[1], "bs")
plt.plot(self.xG[0], self.xG[1], "gs")
plt.plot(obs_x, obs_y, "sk")
plt.title(name)
plt.axis("equal")
def plot_visited(self, visited, cl='gray'):
if self.xI in visited:
visited.remove(self.xI)
if self.xG in visited:
visited.remove(self.xG)
count = 0
for x in visited:
count += 1
plt.plot(x[0], x[1], color=cl, marker='o')
plt.gcf().canvas.mpl_connect('key_release_event',
lambda event: [exit(0) if event.key == 'escape' else None])
if count < len(visited) / 3:
length = 20
elif count < len(visited) * 2 / 3:
length = 30
else:
length = 40
#
# length = 15
if count % length == 0:
plt.pause(0.001)
plt.pause(0.01)
def plot_path(self, path, cl='r', flag=False):
path_x = [path[i][0] for i in range(len(path))]
path_y = [path[i][1] for i in range(len(path))]
if not flag:
plt.plot(path_x, path_y, linewidth='3', color='r')
else:
plt.plot(path_x, path_y, linewidth='3', color=cl)
plt.plot(self.xI[0], self.xI[1], "bs")
plt.plot(self.xG[0], self.xG[1], "gs")
plt.pause(0.01)
def plot_visited_bi(self, v_fore, v_back):
if self.xI in v_fore:
v_fore.remove(self.xI)
if self.xG in v_back:
v_back.remove(self.xG)
len_fore, len_back = len(v_fore), len(v_back)
for k in range(max(len_fore, len_back)):
if k < len_fore:
plt.plot(v_fore[k][0], v_fore[k][1], linewidth='3', color='gray', marker='o')
if k < len_back:
plt.plot(v_back[k][0], v_back[k][1], linewidth='3', color='cornflowerblue', marker='o')
plt.gcf().canvas.mpl_connect('key_release_event',
lambda event: [exit(0) if event.key == 'escape' else None])
if k % 10 == 0:
plt.pause(0.001)
plt.pause(0.01)
@staticmethod
def color_list():
cl_v = ['silver',
'wheat',
'lightskyblue',
'royalblue',
'slategray']
cl_p = ['gray',
'orange',
'deepskyblue',
'red',
'm']
return cl_v, cl_p
@staticmethod
def color_list_2():
cl = ['silver',
'steelblue',
'dimgray',
'cornflowerblue',
'dodgerblue',
'royalblue',
'plum',
'mediumslateblue',
'mediumpurple',
'blueviolet',
]
return cl






