关注
码龄
粉丝数
原力等级 --
被采纳
被点赞
采纳率
m0_73328666
2022-11-13 11:35
采纳率: 25%
浏览 22
首页
运维
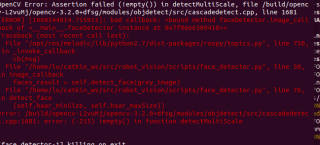
ros+opencv进行人脸识别时出现错误
linux
ubuntu
roslaunch robot_vision usb_cam.launch运行这个命令可以正常打开摄像头
roslaunch robot_vision face_detector.launch运行这个命令出现上图中的报错
rqt_image_view运行这个命令可以打开人脸识别图像,但是非常卡顿
收起
写回答
好问题
0
提建议
追加酬金
关注问题
微信扫一扫
点击复制链接
分享
邀请回答
编辑
收藏
删除
结题
收藏
举报
追加酬金
(90%的用户在追加酬金后获得了解决方案)
当前问题酬金
¥
0
(可追加 ¥500)
支付方式
扫码支付
加载中...
支付金额
15
元
提供问题酬金的用户不参与问题酬金结算和分配
支付即为同意
《付费问题酬金结算规则》
1
条回答
默认
最新
关注
码龄
粉丝数
原力等级 --
被采纳
被点赞
采纳率
CSDN-Ada助手
CSDN-AI 官方账号
2022-11-13 14:42
关注
关于该问题,我找了一篇非常好的博客,你可以看看是否有帮助,链接:
ROS+OpenCV 人脸识别,物体识别
本回答被题主选为最佳回答
, 对您是否有帮助呢?
本回答被专家选为最佳回答
, 对您是否有帮助呢?
本回答被题主和专家选为最佳回答
, 对您是否有帮助呢?
解决
无用
评论
打赏
微信扫一扫
点击复制链接
分享
举报
评论
按下Enter换行,Ctrl+Enter发表内容
查看更多回答(0条)
向“C知道”追问
报告相同问题?
提交
关注问题
在
ros
1中运行代码
时
出现
错误
,需要解决一下
r语言
2023-01-08 12:13
回答 3
已采纳
望采纳!!!!点击回答右侧采纳即可采纳!!!这个
错误
的原因是
ROS
无法找到名为 iat_publish 和 voice_assistant 的节点。 要解决这个
错误
,需要确保以下几点: 1.在 v
opencv
裁剪之后
出现
报错'NoneType' object is not subscriptable
opencv
python
图像处理
有问必答
2022-04-02 20:55
回答 3
已采纳
cv2.imread(img_name2) 图片没有读取成功 ,返回值是None检查下img_name2地址的图片是否存在
ROS
中
进行
catkin_make
出现
“undefined reference to `
ros
::console::initializeLogLocation'”的
错误
自动驾驶
2022-05-06 15:07
回答 1
已采纳
看起来像是函数未定义,你检查一下你的CMakeLists.txt里依赖项是否添加全了,是不是有缺失
ROS
——机器视觉
2022-10-23 20:52
哩lililili的博客
ROS
——机器视觉详解
在跑
ros
_navigation框架
时
出现
报错,如何解决
python
2023-03-08 16:26
回答 7
已采纳
根据报错信息,可以看出是由于无法在指定
时
间内获取到从base_link到laser的变换信息,导致了costmap运行失败。因此,需要先解决获取变换信息的问题。 在
ROS
中,tf变换信息的发布和订阅是
ROS
在
进行
导航
时
,
出现
一直下发角速度和线速度为0的情况
自动驾驶
2020-09-16 16:57
回答 1
已采纳
https://blog.csdn.net/qq_29320587/article/details/104842330
pcl在vscode中的编译
错误
ubuntu18.04+
ros
melodic
c++
vscode
有问必答
2021-07-26 13:29
回答 2
已采纳
该项目为
ros
项目,因此在编译和生成的
时
候需在
ros
环境下。解决方案,删除项目中的tasks.json文件和launch.json文件;安装
ros
插件,使用
ros
插件生成相应的tasks.json文件
ROS
与机器人
2021-01-23 18:20
lwlv的博客
快一年没用
ROS
了,不过尽管如此,如果有人在博客上问之前关于
ROS
的技术问题,我还是会很仔细得回答。结合这些问题,加上从事的机器人与自动化行业的经历和经验,
进行
一个简单的整理和总结。 1. 机器人 机器人的...
MATLAB,使用
ros
init
错误
,更改python版本
python
2022-10-06 14:56
回答 1
已采纳
W10还需要安装python3.9版本https://www.python.org/downloads/windows/查看pyenv('Version','3.9')
结构体数组访问溢出,在接收实
时
数据
时
,
ROS
会报错段
错误
(核心已转储)
c++
ubuntu
自动驾驶
2022-03-27 17:07
回答 1
已采纳
已解决,您首先要根据valid_node_quantity这个变量判断有多少个block,判断node[]数组的长度 void filter(const nlink_parser::Linktrack
虚拟机ubuntu安装
ros
系统
出现
问题
linux
ubuntu
2022-07-21 17:46
回答 1
已采纳
dpkg
出现
问题cd /var/lib/dpkg/sudo mv info/ info_bak # 现将info文件夹更名sudo mkdir info
No rule to make target `/usr/lib/arm-linux-gnueabihf/lib
opencv
_videostab.so.2.4.8‘
2018-12-09 00:54
小小何先生的博客
> 我的微信公众号名称:深度学习与先进智能决策 > 微信公众号ID:...在ubuntu14.04下安装kinect报了很多
错误
:主要是
opencv
的版本与
ros
之间的冲突: 报错: make[2]: *** 没有规则可以创建“/.so”需...
在ubuntu中安装sudo apt install
ros
-noetic-desktop-full
出现
报错
linux
ubuntu
2022-04-26 08:43
回答 3
已采纳
你看一下我这篇文章,对比一下流程是否跟你的一样,在安装前是需要
进行
一些配置的,如果配置并不一样,那可能就是你配置的问题了https://blog.csdn.net/aibingjin/article/
关于Ubuntu18.04/20.04安装后的一系列环境配置过程的总结
2023-03-16 22:45
M0rtzzGod的博客
所以安装官网最近更新过的
OpenCV
3.4.16 经尝试多版本Ubuntu和
OpenCV
,装Ubuntu20.04,
ROS
noetic和
OpenCV
4.2.0及其扩展模块才能解决将彩色图像转换为网络所需的输入Blob后前馈
时
抛出的(raised
OpenCV
exception,...
机器学习项目简历收集册-----机器学习(仅供参考)
2020-08-16 22:47
大大枫free的博客
图像识别 项目一:齿轮表面粗糙度自动检测 开发应用:python3+sklearn+
opencv
项目描述:1)使用CCD相机获取齿轮表面图像 2)图片预处理,使用中值滤波,去除图片椒盐噪声,使用...3)对模型
进行
训练,提高验证码的识别
没有解决我的问题,
去提问
向专家提问
向AI提问
◇ 用户帮助中心
◇《冲榜分奖金》活动下线公告 及AIGC类回答处理措施
◇ 新手如何提问
◇ 奖惩公告
问题事件
关注
码龄
粉丝数
原力等级 --
被采纳
被点赞
采纳率
创建了问题
11月13日
悬赏问题
¥15
自动转发微信群信息到另外一个微信群
¥15
outlook无法配置成功
¥30
这是哪个作者做的宝宝起名网站
¥60
版本过低apk如何修改可以兼容新的安卓系统
¥25
由IPR导致的DRIVER_POWER_STATE_FAILURE蓝屏
¥50
有数据,怎么建立模型求影响全要素生产率的因素
¥50
有数据,怎么用matlab求全要素生产率
¥15
TI的insta-spin例程
¥15
完成下列问题完成下列问题
¥15
C#算法问题, 不知道怎么处理这个数据的转换

 分享
分享 创建了问题
11月13日
创建了问题
11月13日





