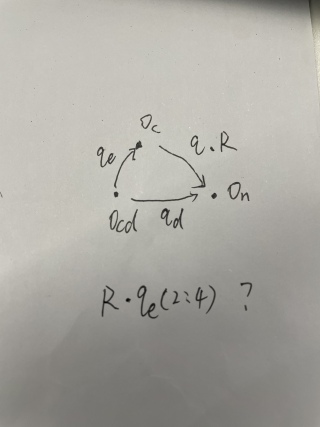
背景:如下图所示,Oc表示云台末端相机坐标系,Ocd表示期望云台姿态的坐标系,On为北东地坐标系。q、qd、qe表示相应姿态转换的四元数,R(3×3矩阵)表示Oc到On的旋转矩阵
问题:看到云台控制代码中有用R乘qe的后三项,即R*qe(2:4),其中qe(2:4)为3×1列向量,得到的是相机误差在北东地坐标系下的表示,是3个角度,单位为rad。旋转矩阵乘四元数的虚数部分有什么物理意义啊?这样做的原理是什么?麻烦各位da佬指点一下好费解啊!

背景:如下图所示,Oc表示云台末端相机坐标系,Ocd表示期望云台姿态的坐标系,On为北东地坐标系。q、qd、qe表示相应姿态转换的四元数,R(3×3矩阵)表示Oc到On的旋转矩阵
问题:看到云台控制代码中有用R乘qe的后三项,即R*qe(2:4),其中qe(2:4)为3×1列向量,得到的是相机误差在北东地坐标系下的表示,是3个角度,单位为rad。旋转矩阵乘四元数的虚数部分有什么物理意义啊?这样做的原理是什么?麻烦各位da佬指点一下好费解啊!
 分享
分享
四元数的实部代表旋转轴的方向,虚数部代表旋转轴的长度,即旋转角。对于相机姿态误差表征,将相机姿态误差四元数qe乘以旋转矩阵R的后三项(R*qe(2:4))即可得到相机误差在北东地坐标系下的表示,以3个角度的形式呈现,单位为rad。这样的做法是将四元数形式的姿态误差转化为欧拉角,方便误差的矫正和表示。
分享 已结题
(查看结题原因) 2月8日
修改了问题
2月4日
修改了问题
2月4日
创建了问题
2月4日
已结题
(查看结题原因) 2月8日
修改了问题
2月4日
修改了问题
2月4日
创建了问题
2月4日




