function [angle_theta1,angle_theta2,angle_theta3] = inver(px,py,pz) %11,0,0为零点
syms theta1 theta2 theta3 l a1 a2 a3
pi = 3.1415926;
a1 = 4.9;
a2 = 6.5;
a3 = 15.5;
l = 12.8;
theta1 = atan2(py,px);
theta2 = -2*atan((((8*(a2^2*a3*l - a2^2*a3*pz))/((a1^2 - 2*a1*px - a2^2 + 2*a2*a3 - a3^2 + l^2 - 2*l*pz + px^2 + pz^2)*(a1^2 - 2*a1*a2 - 2*a1*px + a2^2 + 2*a2*px - a3^2 + l^2 - 2*l*pz + px^2 + pz^2)) - (4*a2*a3*((- a1^2 + 2*a1*px + a2^2 + 2*a2*a3 + a3^2 - l^2 + 2*l*pz - px^2 - pz^2)*(a1^2 - 2*a1*px - a2^2 + 2*a2*a3 - a3^2 + l^2 - 2*l*pz + px^2 + pz^2))^(1/2))/((a1^2 - 2*a1*px - a2^2 + 2*a2*a3 - a3^2 + l^2 - 2*l*pz + px^2 + pz^2)*(a1^2 - 2*a1*a2 - 2*a1*px + a2^2 + 2*a2*px - a3^2 + l^2 - 2*l*pz + px^2 + pz^2)))*(a1^2 - 2*a1*px - a2^2 + 2*a2*a3 - a3^2 + l^2 - 2*l*pz + px^2 + pz^2))/(4*a2*a3));
theta3 = -2*atan(((- a1^2 + 2*a1*px + a2^2 + 2*a2*a3 + a3^2 - l^2 + 2*l*pz - px^2 - pz^2)*(a1^2 - 2*a1*px - a2^2 + 2*a2*a3 - a3^2 + l^2 - 2*l*pz + px^2 + pz^2))^(1/2)/(a1^2 - 2*a1*px - a2^2 + 2*a2*a3 - a3^2 + l^2 - 2*l*pz + px^2 + pz^2));
angle_theta1 = theta1/pi*180;
angle_theta2 = theta2/pi*180;
angle_theta3 = theta3/pi*180;
end
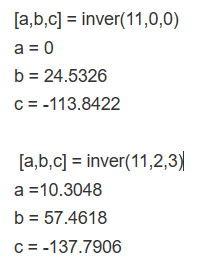
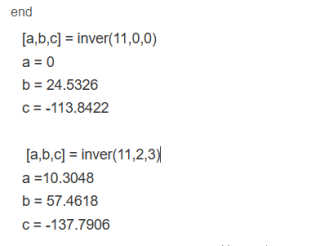
最后的代码是matlab上的运行成果,转换成c语言后算出来的角度angle_theta也需要一致,需要验证答案正确性。
把这段matlab代码改成c语言的函数。
这段matlab代码是计算逆运动学三个角度的,由于其中的^2平方形式无法用在c语言上,所以需要转换成pow的方式,比较难。其实只要将所有的^2平方格式的转化成pow格式即可。函数的解释是:输入三个参数px py pz,为尖端的三个坐标,然后利用这三个坐标计算theta123,然后弧度制转角度制,输出。
记得先验证答案正确再回答,感谢大家!