关注
码龄
粉丝数
原力等级 --
被采纳
被点赞
采纳率
石去皿
2023-03-06 21:30
采纳率: 100%
浏览 15
首页
已结题
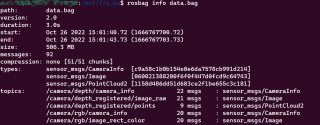
ROS数据集判断相机类型
其他
请问这种文件存储结构,是那种相机具有的?只有一个ros数据集,但我想知道它是用什么相机拍摄的。
收起
写回答
好问题
0
提建议
关注问题
微信扫一扫
点击复制链接
分享
邀请回答
编辑
收藏
删除
收藏
举报
1
条回答
默认
最新
关注
码龄
粉丝数
原力等级 --
被采纳
被点赞
采纳率
threenewbee
2023-03-11 13:41
关注
不同的相机都可能有这样的,但是cancon看着比较像。
本回答被题主选为最佳回答
, 对您是否有帮助呢?
本回答被专家选为最佳回答
, 对您是否有帮助呢?
本回答被题主和专家选为最佳回答
, 对您是否有帮助呢?
解决
1
无用
评论
打赏
微信扫一扫
点击复制链接
分享
举报
评论
按下Enter换行,Ctrl+Enter发表内容
查看更多回答(0条)
向“C知道”追问
报告相同问题?
提交
关注问题
机械臂
相机
标定概念流程
ROS
、
ROS
2 详细入门教程
2025-09-20 15:37
kuan_li_lyg的博客
本文介绍了工业
相机
标定工具集的使用方法,主要包括
相机
内参和外参标定两大部分。内容涵盖标定基本概念(内参、外参、校正图像等)、OpenCV
相机
模型、标定目标定位方法(ModifiedCircleGrid和CharucoGrid等),以及...
ROS
合集(八)SVIn2声呐数据流动
2025-07-06 20:57
大鹅同志的博客
系统采用多线程异步处理,主要包含三个部分:1)
ROS
回调线程接收声纳原始数据,预处理后存入线程安全队列;2) 消费线程从队列取出数据,写入历史缓存并通知主线程;3) 主融合线程同步声纳与视觉数据,构造残差块进行...
[
ROS
学习]Euroc
数据集
真实轨迹的读取与显示
2023-02-23 14:02
Sunsetfmb的博客
基于rviz的euroc
数据集
真实轨迹的显示
使用D435i
相机
录制TUM格式的
数据集
2023-03-23 16:25
摆烂女侠的博客
本文写于2023年3月14日。D435i
相机
的rgb图像与depth图像的像素没有对齐,在此记录一下如何像素对齐。
KITTI
数据集
高效下载与
ros
bag转换实战指南
2026-03-05 00:32
L oiey的博客
本文针对国内用户下载KITTI
数据集
的难题,提供了从“野路子”资源站、国内网盘到稳定镜像源的高效下载方案,并详细解析了将KITTI图片序列转换为
ROS
bag格式的核心原理与实战步骤。文章重点解决了转换过程中的时间戳...
SLAM实战:如何利用TUM
数据集
进行算法测评(含
ROS
环境配置避坑指南)
2025-10-22 05:53
Stone的博客
内容涵盖TUM
数据集
的结构解析与时间同步预处理,并深入剖析了在
ROS
环境中配置测评工具链时,解决catkin与
ros
build共存难题的避坑方案。最后,介绍了使用evo等工具进行绝对轨迹误差(ATE)和相对位姿误差(RPE)量化...
数据集
测试orb_slam3
2025-07-04 15:35
w_1234566的博客
因为orb-slam3将一些常见的
数据集
的配置文件提前下载好了,如果需要使用其他的
数据集
就需要替换为新的
数据集
配置文件的地址 第四行是你的
数据集
文件夹路径,这里是 EuRoC
数据集
中的 MH_01_easy 场景的图像和IMU数据...
SLAM之BundleFusion测试自制
Ros
bag
数据集
的可行方案
2019-07-02 07:46
我是工程狮的博客
SLAM之BundleFusion测试自制
Ros
bag
数据集
前言 最近在做三维重建与轨迹定位相关的研究,需要以一些传统的重建算法做Baselines,我们选择了KinectFusion、ElasticFusion、BundleFusion、ORB-SLAM、VINS等典型的算法...
在
ros
2 humble中 保存深度
相机
的点云图片为.pcd文件并查看
2025-12-28 14:22
mmwmmmmmmmmmmmmm的博客
在利用点云来实现3D识别的构建
数据集
的时候 我们需要保存图片,就像图片有.png格式一样,点云有属于自己的.pcd文件 这篇文章里,我们将会利用捕捉到的点云信息,并且保存为.pcd文件,并用pcd_tools来查看这些文件。...
【论文阅读】多传感器SLAM
数据集
2024-03-03 20:18
Ayakanoinu的博客
总结多传感器SLAM
数据集
的传感器布置以及主要卖点
没有解决我的问题,
去提问
向专家提问
向AI提问
付费问答(悬赏)服务下线公告
◇ 用户帮助中心
◇ 新手如何提问
◇ 奖惩公告
问题事件
关注
码龄
粉丝数
原力等级 --
被采纳
被点赞
采纳率
系统已结题
3月19日
关注
码龄
粉丝数
原力等级 --
被采纳
被点赞
采纳率
已采纳回答
3月11日
关注
码龄
粉丝数
原力等级 --
被采纳
被点赞
采纳率
创建了问题
3月6日


 分享
分享 分享
分享 系统已结题
3月19日
系统已结题
3月19日 已采纳回答
3月11日
创建了问题
3月6日
已采纳回答
3月11日
创建了问题
3月6日

