
我使用的是ur5和robotiq2F140,找到了通过socket控制robotiq2F85的代码,现在想用这个代码控制robotiq2F140,但是缺似乎无法连接夹爪,收到以下报错,
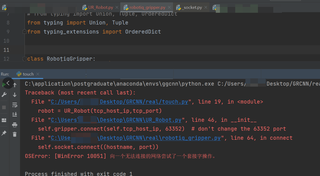
应该是没有和夹爪建立联系,目前夹爪连接在工控机上,可以通过ur的示教器来进行闭合控制,想请教一下该如何修改才能和夹爪通讯
这是用的夹爪控制代码:
https://github.com/githubuser0xFFFF/py_robotiq_gripper/blob/master/src/robotiq_gripper.py







