关于PY32F002A实现TIM1和TIM16同时运行 mcu没有任何反应 以下是初始化和中断
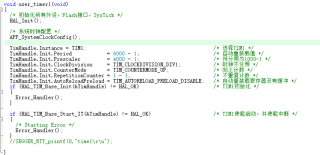
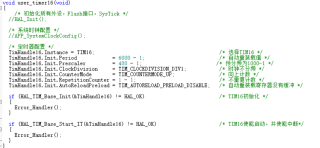
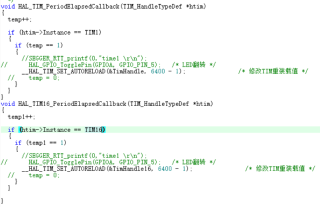


关于PY32F002A实现TIM1和TIM16同时运行 mcu没有任何反应 以下是初始化和中断
 分享
分享
TIM16_InitStruct.TIM_ClockSource = TIM_ClockSource_Internal;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM16, ENABLE);
RCC_LSICmd(ENABLE);
while(RCC_GetFlagStatus(RCC_FLAG_LSIRDY) == RESET);
#include "stm32f0xx.h"
TIM_TimeBaseInitTypeDef TIM1_InitStruct;
TIM_TimeBaseInitTypeDef TIM16_InitStruct;
void RCC_Configuration(void)
{
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOA, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM16, ENABLE);
RCC_LSICmd(ENABLE);
while(RCC_GetFlagStatus(RCC_FLAG_LSIRDY) == RESET);
}
void GPIO_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_PinAFConfig(GPIOA, GPIO_PinSource8, GPIO_AF_2);
}
void TIM1_Configuration(void)
{
TIM1_InitStruct.TIM_Prescaler = 480-1;
TIM1_InitStruct.TIM_CounterMode = TIM_CounterMode_Up;
TIM1_InitStruct.TIM_Period = 1000-1;
TIM1_InitStruct.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInit(TIM1, &TIM1_InitStruct);
TIM_ITConfig(TIM1, TIM_IT_Update, ENABLE);
TIM_Cmd(TIM1, ENABLE);
}
void TIM16_Configuration(void)
{
TIM16_InitStruct.TIM_Prescaler = 480-1;
TIM16_InitStruct.TIM_CounterMode = TIM_CounterMode_Up;
TIM16_InitStruct.TIM_Period = 500-1;
TIM16_InitStruct.TIM_ClockDivision = TIM_CKD_DIV1;
TIM16_InitStruct.TIM_ClockSource = TIM_ClockSource_Internal;
TIM_TimeBaseInit(TIM16, &TIM16_InitStruct);
TIM_ITConfig(TIM16, TIM_IT_Update, ENABLE);
TIM_Cmd(TIM16, ENABLE);
}
void NVIC_Configuration(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = TIM1_BRK_UP_TRG_COM_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
NVIC_InitStructure.NVIC_IRQChannel = TIM16_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
void TIM1_BRK_UP_TRG_COM_IRQHandler(void)
{
if(TIM_GetITStatus(TIM1, TIM_IT_Update) != RESET)
{
TIM_ClearITPendingBit(TIM1, TIM_IT_Update);
GPIO_ToggleBits(GPIOA, GPIO_Pin_8);
}
}
void TIM16_IRQHandler(void)
{
if(TIM_GetITStatus(TIM16, TIM_IT_Update) != RESET)
{
TIM_ClearITPendingBit(TIM16, TIM_IT_Update);
GPIO_ToggleBits(GPIOA, GPIO_Pin_8);
}
}
int main(void)
{
RCC_Configuration();
GPIO_Configuration();
TIM1_Configuration();
TIM16_Configuration();
NVIC_Configuration();
while(1);
}
 已结题
(查看结题原因) 4月7日
创建了问题
3月31日
已结题
(查看结题原因) 4月7日
创建了问题
3月31日


