

请问怎么把矩阵u的第一行有全都是常数75变成由矩阵x来赋值得到的呢?

 分享
分享
 关注
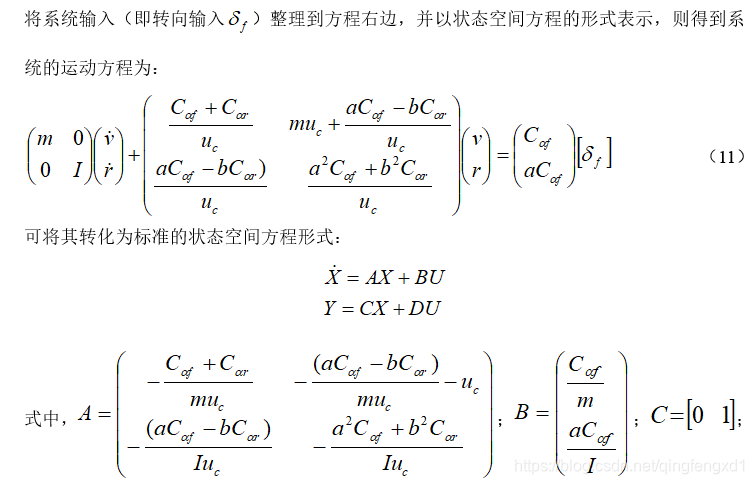
关注汽车以恒速行驶时,汽车只有沿y轴的侧向远动与绕z轴的横摆运动两个自由度。此外,汽车的侧向加速度限定在0.4g以内,轮胎侧偏特性处于线性范围。图1所示为一个由前后两个侧向弹性的轮胎支撑于地面、具有侧向及横摆运动的线性二自由度汽车模型,其运动方程为:







2.3 稳定性分析
通常,随着车速的提高,车辆的行驶稳定性下降。对具有过多转向特性的车辆而言,当车速超过其极限车速时,系统将处于不稳定工况,即意味着在很小的干扰输入时,系统将产生很大的响应输出(如高速转向时车辆可能发生侧滑)。而车辆行驶的稳定性与其等效线性系统的特征值有密切的联系。
在MATLAB环境中有多种方法可以求系统的特征根(即极点),其中最直接的方法可调用eig()命令来求一个矩阵的特征值。由控制理论可知,一个可观、可控的线性系统的就是状态矩阵A的特征值,因此,求解车辆在不同车速(15~60m/s范围内)的特征根,同时在同一复平面中作图,可采用如下MATLAB程序段:
U=15:5:60;
for j=1:length(U)
A=[-(Cf+Cr)/(M*U(j)) -(a*Cf-b*Cr)/(M*U(j))-U(j)
-(a*Cf-b*Cr)/(Iz*U(j)) -(a^2*Cf+b^2*Cr)/(Iz*U(j))];
plot(real(eig(A)),imag(eig(A)),'bx');
hold on;
end
其中,命令语句real()和imag()分别用于系统特征值的实部和虚部求解。
不同车速下的根轨迹变化如图4所示。

![]()
分享 创建了问题
4月3日
创建了问题
4月3日

