
遇到一个项目:一种改进自适应M-H重采样的粒子滤波算法,希望有人能帮我看看🧐🧐。谢谢了🙏🏻🙏🏻

怎么用matlab编程实现 改进自适应m-h粒子滤波算法

- 写回答
- 好问题 0 提建议
- 关注问题
 分享
分享- 邀请回答
-

11条回答 默认 最新
 zuogle 2023-04-05 12:36关注
zuogle 2023-04-05 12:36关注该回答引用ChatGPT GPT-4
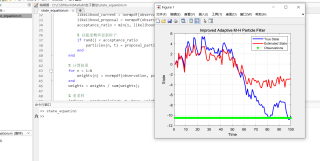
运行结果
代码
% 参数初始化 N = 100; % 粒子数 T = 100; % 时刻数 sigma_sys = 1; % 系统噪声标准差 sigma_obs = 1; % 观测噪声标准差 % 生成真实状态序列 true_state = zeros(T, 1); for t = 2:T true_state(t) = true_state(t-1) + randn() * sigma_sys; end % 生成粒子 particles = randn(N, T) * sigma_sys; % 初始化权重 weights = ones(N, 1) / N; % 用于保存估计状态的变量 state_estimate = zeros(T, 1); % 模拟过程 for t = 1:T % 生成观测值 observation = true_state(t) + randn() * sigma_obs; % M-H算法更新粒子 for n = 1:N % 生成提议粒子 proposal_particle = particles(n, t) + randn() * sigma_sys; % 计算接受概率 likelihood_current = normpdf(observation, particles(n, t), sigma_obs); likelihood_proposal = normpdf(observation, proposal_particle, sigma_obs); acceptance_ratio = min(1, likelihood_proposal / likelihood_current); % 以接受概率更新粒子 if rand() < acceptance_ratio particles(n, t) = proposal_particle; end end % 计算权重 for n = 1:N weights(n) = normpdf(observation, particles(n, t), sigma_obs); end weights = weights / sum(weights); % 重采样 indices = randsample(1:N, N, true, weights); particles(:, t) = particles(indices, t); % 估计状态 state_estimate(t) = mean(particles(:, t)); end % 模拟过程 for t = 1:T % 生成观测值 observation = true_state(t) + randn() * sigma_obs; % 其他代码不变 end % 绘制结果图形 figure; plot(1:T, true_state, 'b', 'LineWidth', 2); % 真实状态用蓝色线表示 hold on; plot(1:T, state_estimate, 'r', 'LineWidth', 2); % 估计状态用红色线表示 scatter(1:T, observation, 'g', 'filled'); % 观测值用绿色点表示 legend('True State', 'Estimated State', 'Observations'); xlabel('Time'); ylabel('State'); title('Improved Adaptive M-H Particle Filter'); grid on;本回答被题主选为最佳回答 , 对您是否有帮助呢?评论 打赏解决 1无用 1举报 分享
- 2025-08-31 18:28适合人群:具备一定信号处理、滤波算法基础,熟悉Matlab编程,从事无人机导航、目标跟踪或状态估计相关研究的科研人员与工程师。 使用场景及目标:①解决传统粒子滤波在三维航迹预测中存在的维度耦合、粒子贫化与...
- 2024-09-01 21:21通过引入适当的改进机制,如自适应重采样、交互式多模型(IMM)、序列重要性重采样(SIR)等策略,可以显著提升粒子滤波算法的性能和预测精度。 本文所附的Matlab项目源码包含了粒子滤波算法的核心实现,以及如何...
- 2025-10-17 23:51内容概要:本文介绍了一种基于改进粒子滤波算法的无人机三维航迹预测方法,并提供了完整的Matlab代码实现。该方法针对传统粒子滤波在无人机轨迹预测中存在的粒子退化、采样贫乏等问题,通过引入自适应重采样机制、...
- 2026-01-09 08:31本文档所提供的基于自适应集成粒子滤波算法的磁图与惯性导航融合算法,特别适用于使用matlab平台进行开发和研究的专业人士。文档中包含的matlab代码清晰地展现了自适应集成粒子滤波算法的实现流程,同时附带的数据...
- 2025-03-01 22:08研究中所附赠的Matlab代码,旨在提供一个易于理解和操作的粒子滤波算法实现框架,便于相关专业的学生和研究人员在课程设计、期末作业和毕业设计中使用。 代码的特点在于其参数化编程方式,这意味着用户可以通过简单...
- 2025-02-23 10:39本压缩包中的文件“非线性非高斯模型的改进粒子滤波算法附Matlab代码”提供了一种经过优化的粒子滤波实现,它包含了参数化编程的特点,这意味着用户可以轻松地修改和调整算法参数来适应不同的模型和应用场景。...
- 2025-11-20 06:30适合人群:具备一定信号处理、估计理论基础,熟悉Matlab编程,从事目标跟踪、状态估计、滤波算法研究的研究生、科研人员及工程技术人员。; 使用场景及目标:①解决存在模型不确定性的动态系统状态估计问题;②实现...
- 2024-10-20 15:50无人机三维轨迹预测是现代空中交通管理和航空安全领域的一个重要研究...通过Matlab平台实现的改进粒子滤波算法,结合无人机动力学模型和项目实战的检验,不仅有助于提升预测精度,还有助于推动无人机技术的创新和应用。
- 2019-12-31 23:052. **粒子滤波算法代码**:这部分提供了粒子滤波算法的实现,可能是用某种编程语言(如Python、C++或Matlab)编写的。代码通常会分为几个主要部分,如初始化粒子、模拟系统动态、计算粒子权重、执行重采样以及更新...
- 2025-10-04 23:42内容概要:本文围绕状态估计与神经网络训练展开,重点研究了扩展卡尔曼滤波(EKF)在BP神经网络训练中的应用,以及粒子滤波(PF)在轨迹估计中的实现,所有内容均通过Matlab代码进行仿真与验证。文中详细探讨了EKF与...
- 没有解决我的问题, 去提问

问题事件
 系统已结题
4月20日
系统已结题
4月20日 已采纳回答
4月12日
已采纳回答
4月12日-
赞助了问题酬金20元
4月5日
-
创建了问题
4月5日