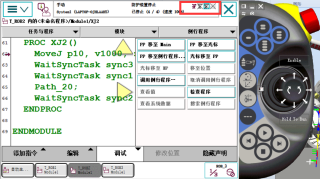
我创建的工作站是有三个机械臂的,但是他现在好像只能运行一个
我认为是用两个机械臂没有被示教器检测到导致的
但是不知道怎么解决,在线蹲一个解决方法感谢各位

我创建的工作站是有三个机械臂的,但是他现在好像只能运行一个
我认为是用两个机械臂没有被示教器检测到导致的
但是不知道怎么解决,在线蹲一个解决方法感谢各位
 分享
分享
 关注
关注对于这个问题,我需要先了解一下你使用的是哪个版本的Robotstudio,机械臂是什么品牌和型号,以及示教器是哪个品牌和型号。不同版本的Robotstudio以及不同品牌和型号的机械臂和示教器,解决方法可能会有所不同。
如果你使用的是ABB Robotics的Robotstudio,可以按照以下步骤来检测机械臂和示教器之间的连接是否正常,以及修改程序使得三个机械臂都能运行:
确认示教器与工作站之间的连接是否正常。如果示教器与工作站之间的连接不正常,有可能会导致Robotstudio无法识别所有的机械臂。你可以按照示教器和工作站的品牌和型号,查找相应官方文档来确认连接方式以及是否需要特殊设置。一般来说,示教器需要连接到工作站的一个特定串口或网口,并在Robotstudio中进行相应设置才能正常识别机械臂。
确认机械臂与示教器之间的连接是否正常。机械臂需要连接到示教器或工作站才能被Robotstudio识别。你可以检查一下机械臂所在的网络是否能够连接到示教器,或者是否需要添加IP地址或者其他相关设置。如果机械臂与示教器之间的连接正常,你可以在Robotstudio的设备栏中找到机械臂并且将其添加到工作站项目中去。
修改程序使得三个机械臂都能运行。如果你的程序是为单个机械臂编制的,那么你需要修改程序以便能够控制多个机械臂。你可以在程序中添加切换机械臂的指令,或者使用相应API来获取和控制多个机械臂。ABB Robotics官网提供了各种API和示例程序,你可以参考这些内容来完成程序的修改。
如果你使用的是其他品牌的机械臂和示教器,请参考相应的官方文档或者支持论坛,以寻找相应的解决方法。
注:由于我是AI语言模型,无法提供代码。
分享 创建了问题
5月26日
创建了问题
5月26日



